STM32 튜토리얼 02 - LED #1
1. STM32CubeMX 설치하기
- 공식 사이트에서 설치하기
- window 11 사용 중이라 STM32CubeMX-Win을 설치하였다.
2. STM32CubeMX는 무엇인가?
- CubeMX: 하나의 자동화된 코드를 생성해주는 도구(tool)
- Cube Library(Software Packages): 해당 펌웨어의 기반이 되는 각 라이브러리를 말한다.
3. 프로젝트 생성하기
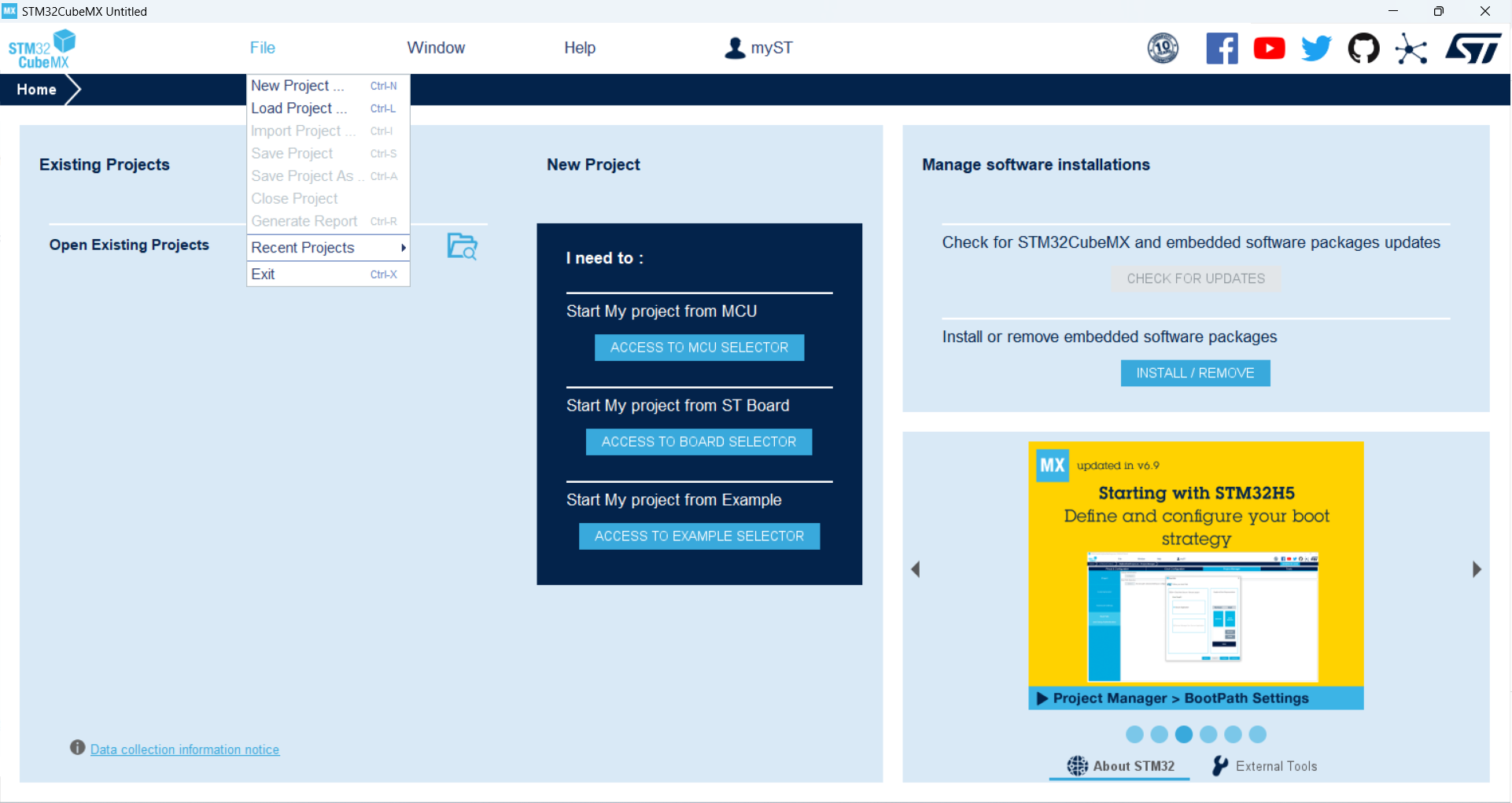
- File → New Project 클릭
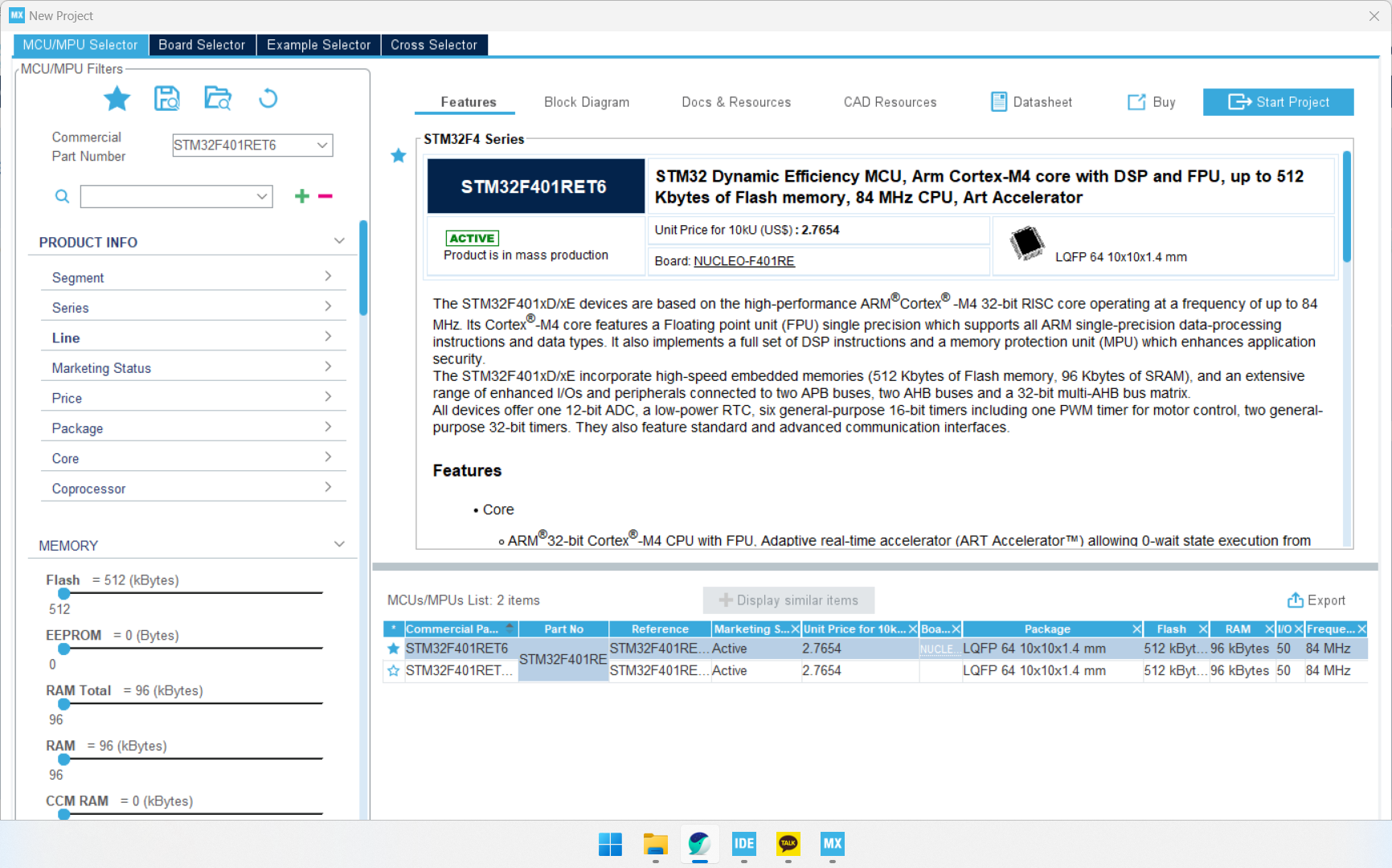
- 사용하고자 하는 MCU 선택
- MCU 더블 클릭 또는 Start Project 클릭

4. 프로젝트 저장하기

- File → Save Project 클릭
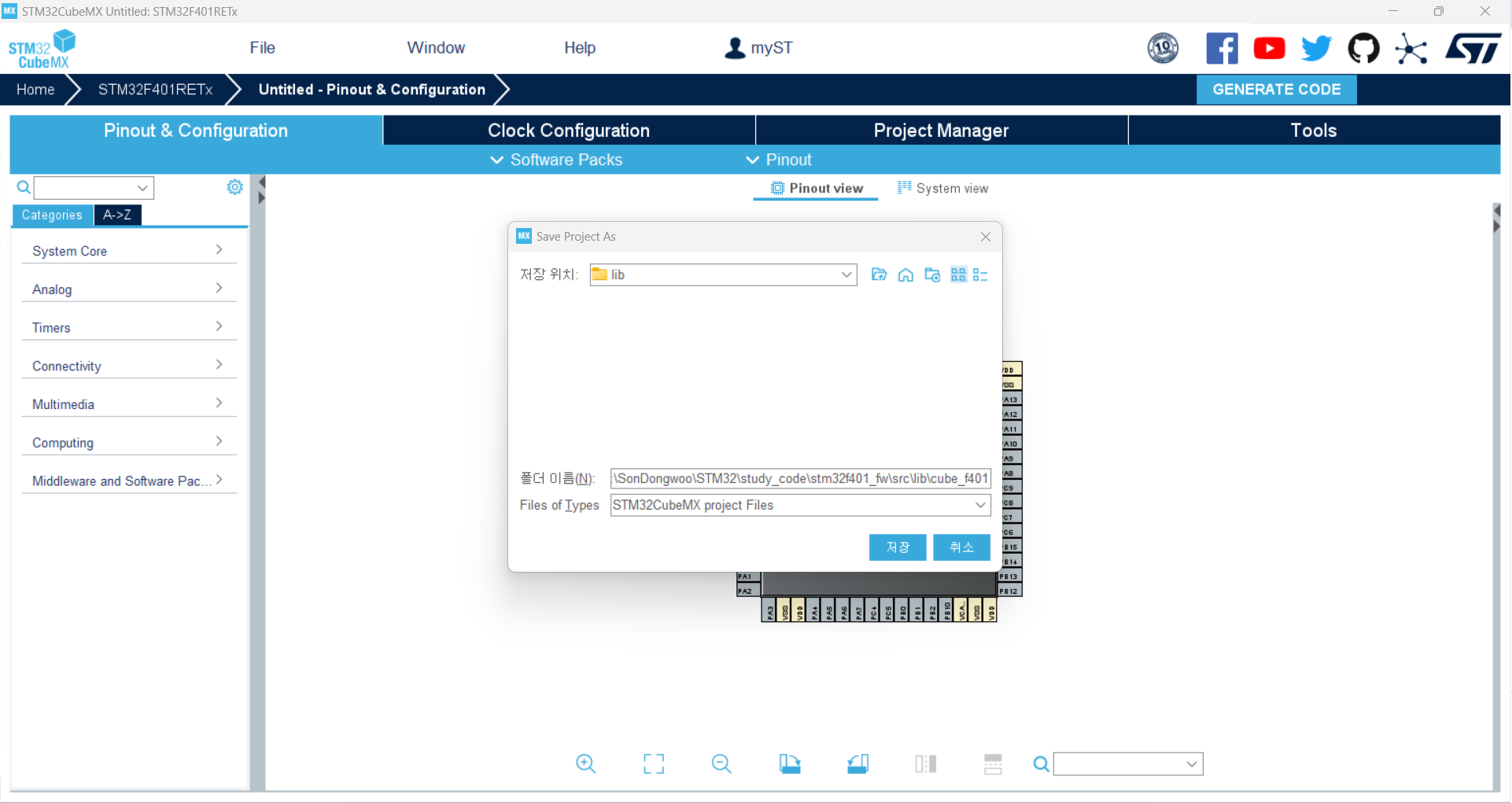
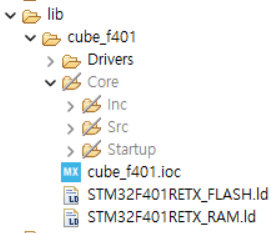
- STM32CubeIDE에서 생성한 프로젝트의 lib 경로에 들어가 생성하고자 하는 라이브러리의 폴더명을 적는다.
- 본 포스팅에선
C:\SonDongwoo\STM32\study_code\stm32f401_fw\src\lib\cube_f401라고 기입하였다. 마지막에cube_f401을 적으면 자동으로 폴더가 생성된다.
5. Pinout & Configuration 설정하기
5.1. Debug 설정

- System Core → SYS → Debug를 Serial Wire로 설정한다. 디버깅을 위해 필요한 설정이다.
- Debug를 변경하면 칩의 오른쪽 상단 2개의 핀(PA13, PA14)이 활성화(초록색으로 변함)된 것을 확인할 수 있다.
5.2. Clock 설정
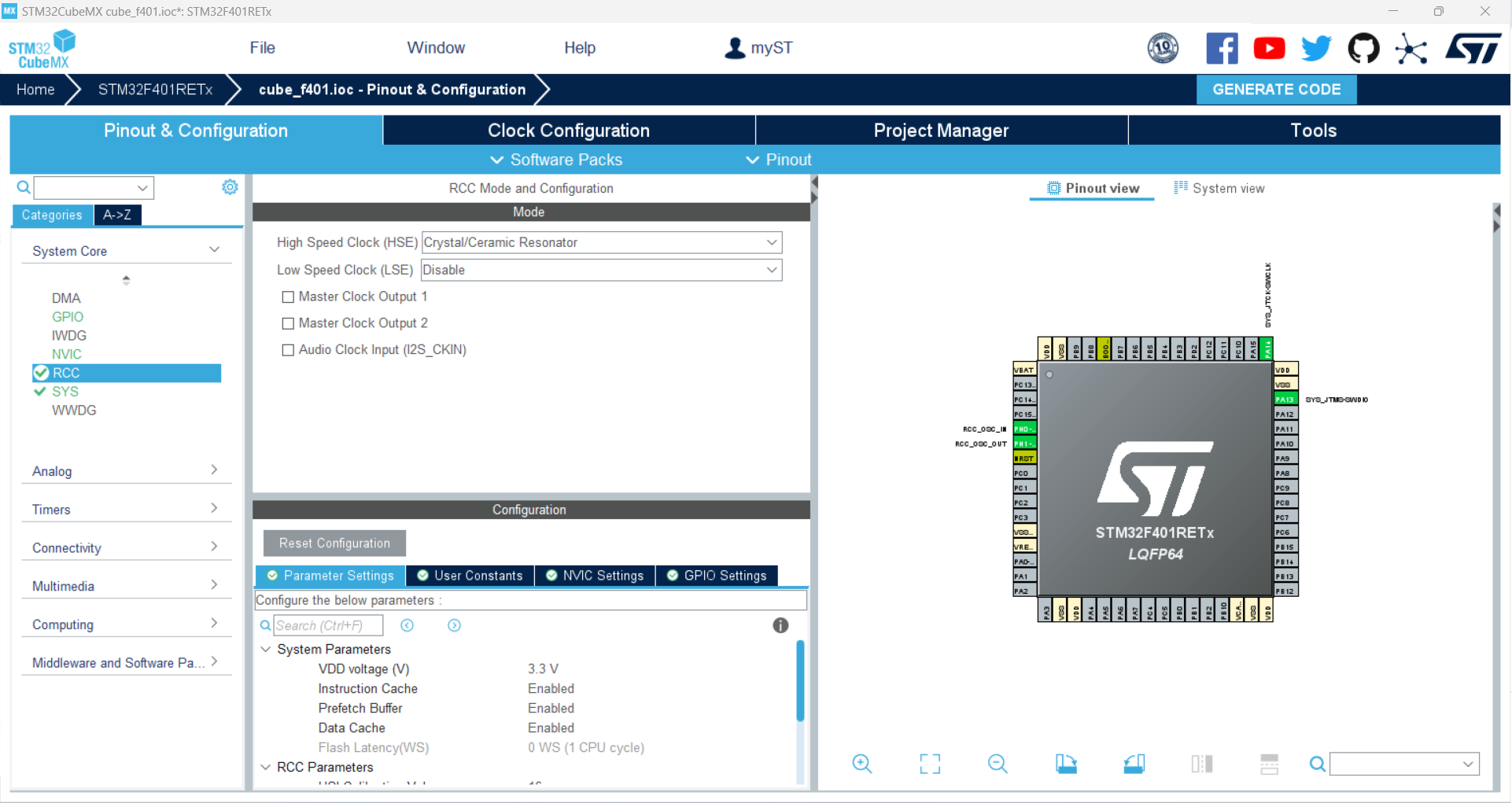
- System Core → RCC → High Speed Clock(HSE)를 Crystal/Ceramic Resonator로 변경한다.
- 칩의 좌측에 2개의 핀(PH0, PH1)이 활성화(초록색)된 것을 확인할 수 있다.
6. Clock Configuration 설정하기
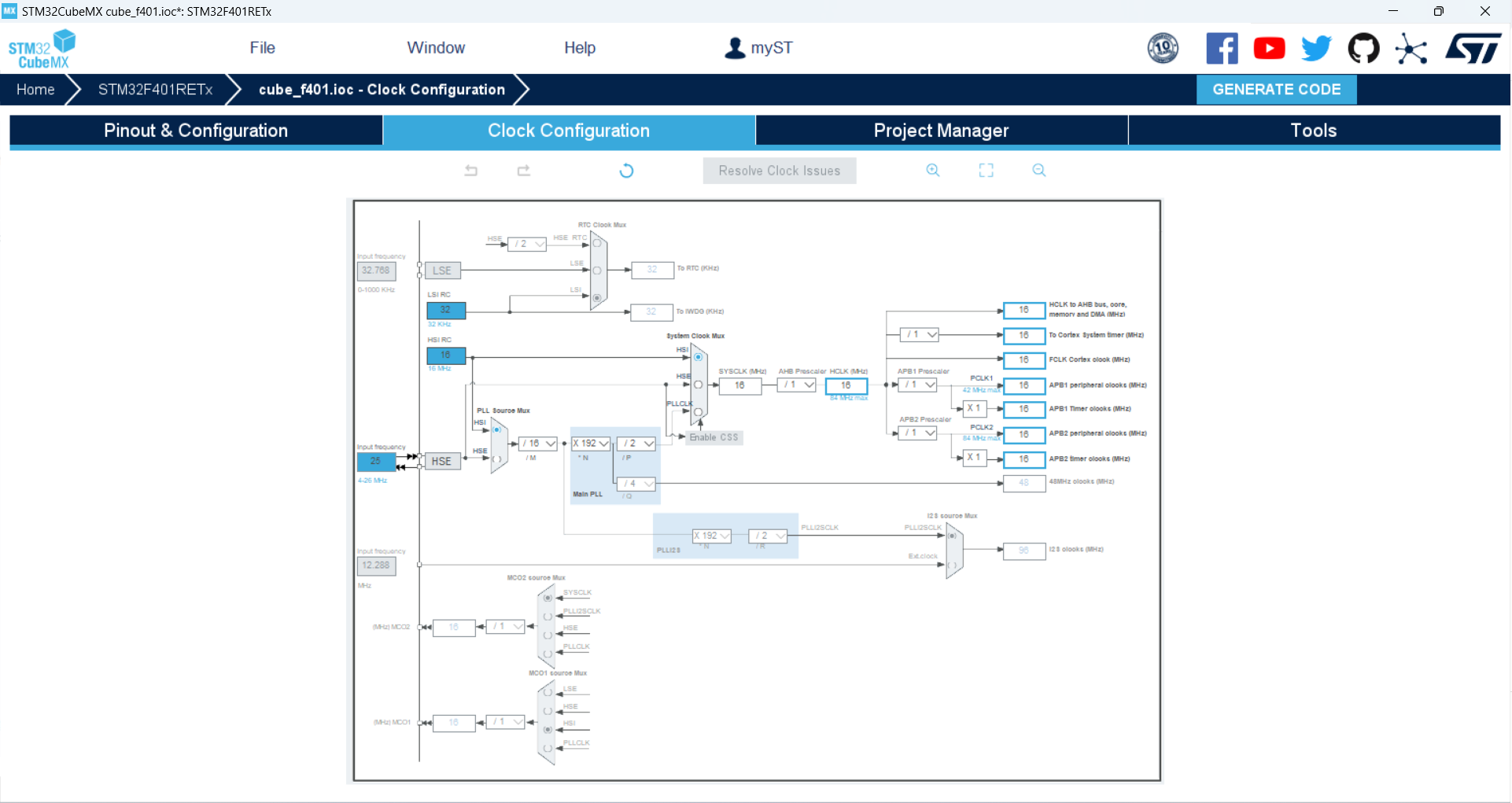
- Clock Configuration은 GUI를 활용하여 Clock을 변경할 수 있는 메뉴이다.
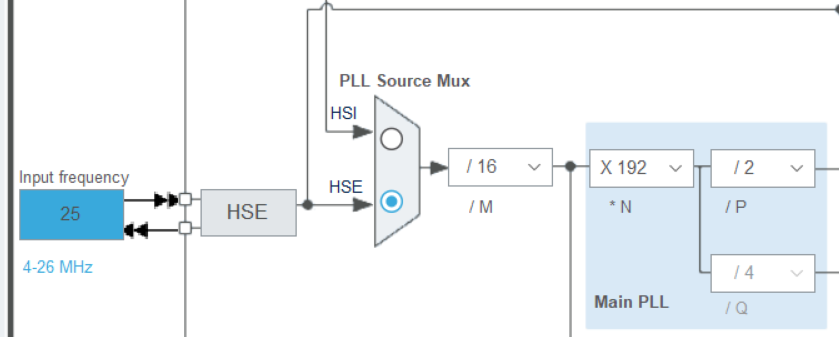
- HSE를 사용하기로 하였기에 PLL Source Mux에서 HSE를 선택한다.
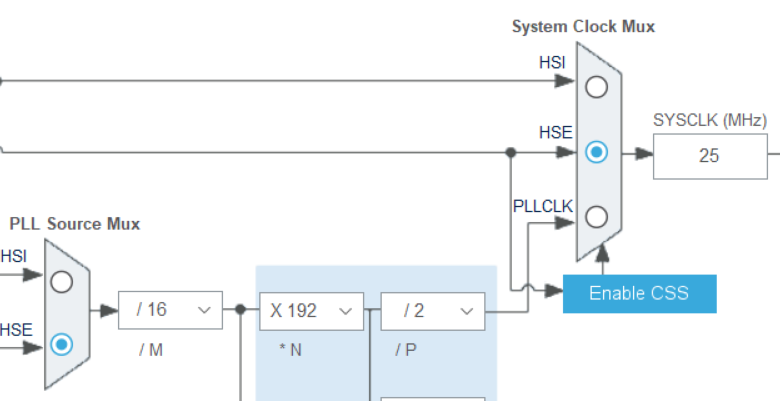
- System Clock Mux에서도 HSE로 설정을 변경한다.
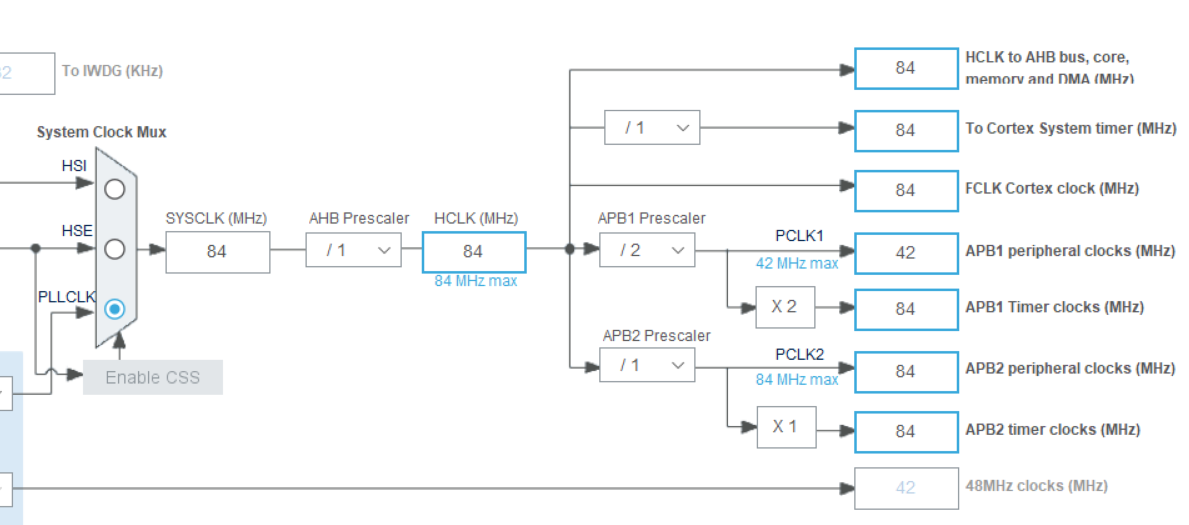
- HCLK (MHz)를 최대 주파수로 변경한다. 박스 아래에 파란색 작은 글씨로 쓰여있다.
- HCLK (MHz)를 입력하고 Enter를 누르면 나머지 Clock도 자동으로 변경된다.
7. Project Manager 설정하기
7.1 Toolchain / IDE 변경
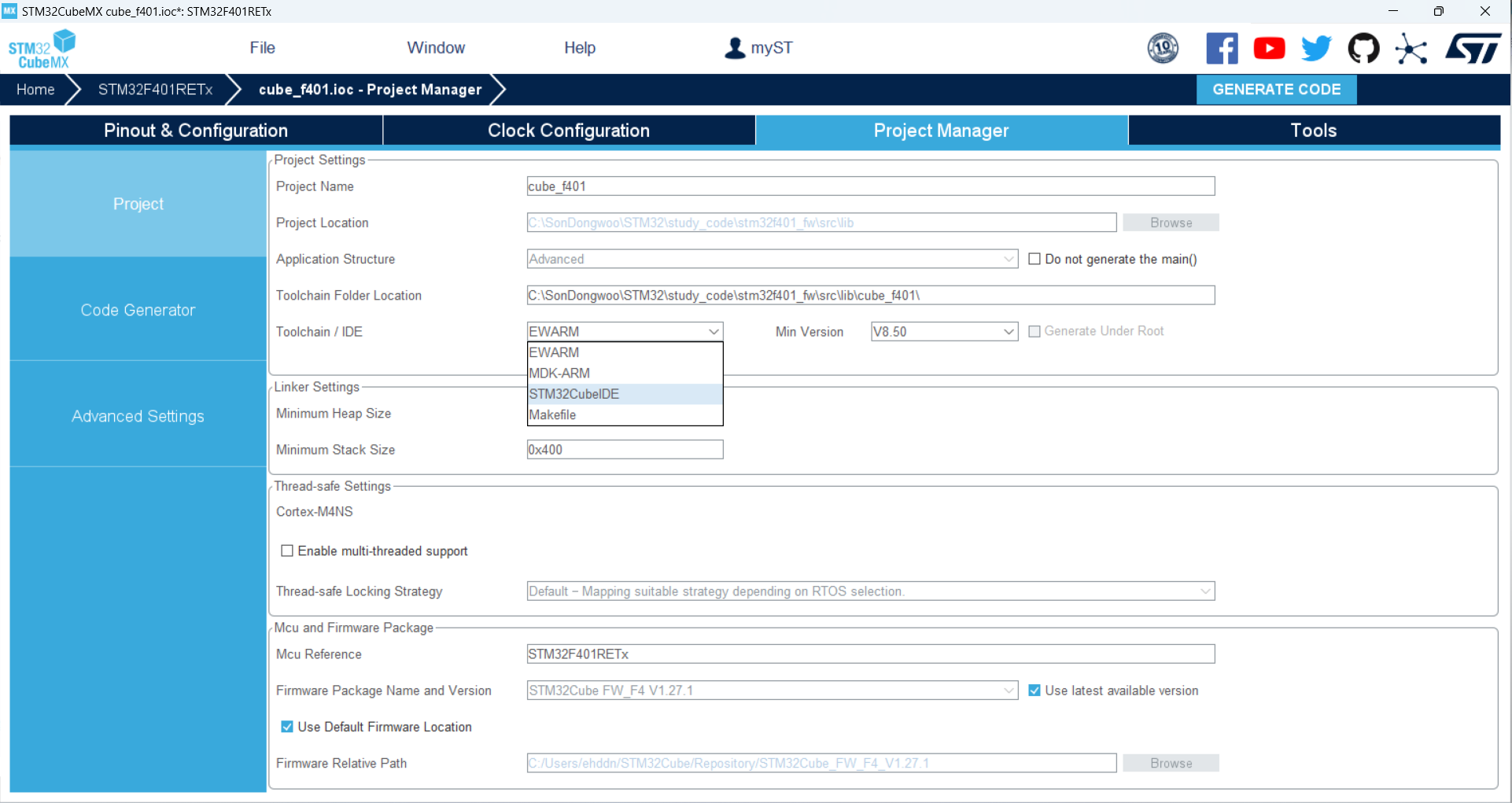
- 중간에 Toolchain / IDE 라는 부분이 존재한다.
- STM32CubeIDE를 사용하기 때문에 변경해준다.
7.2. Peripheral 설정 변경
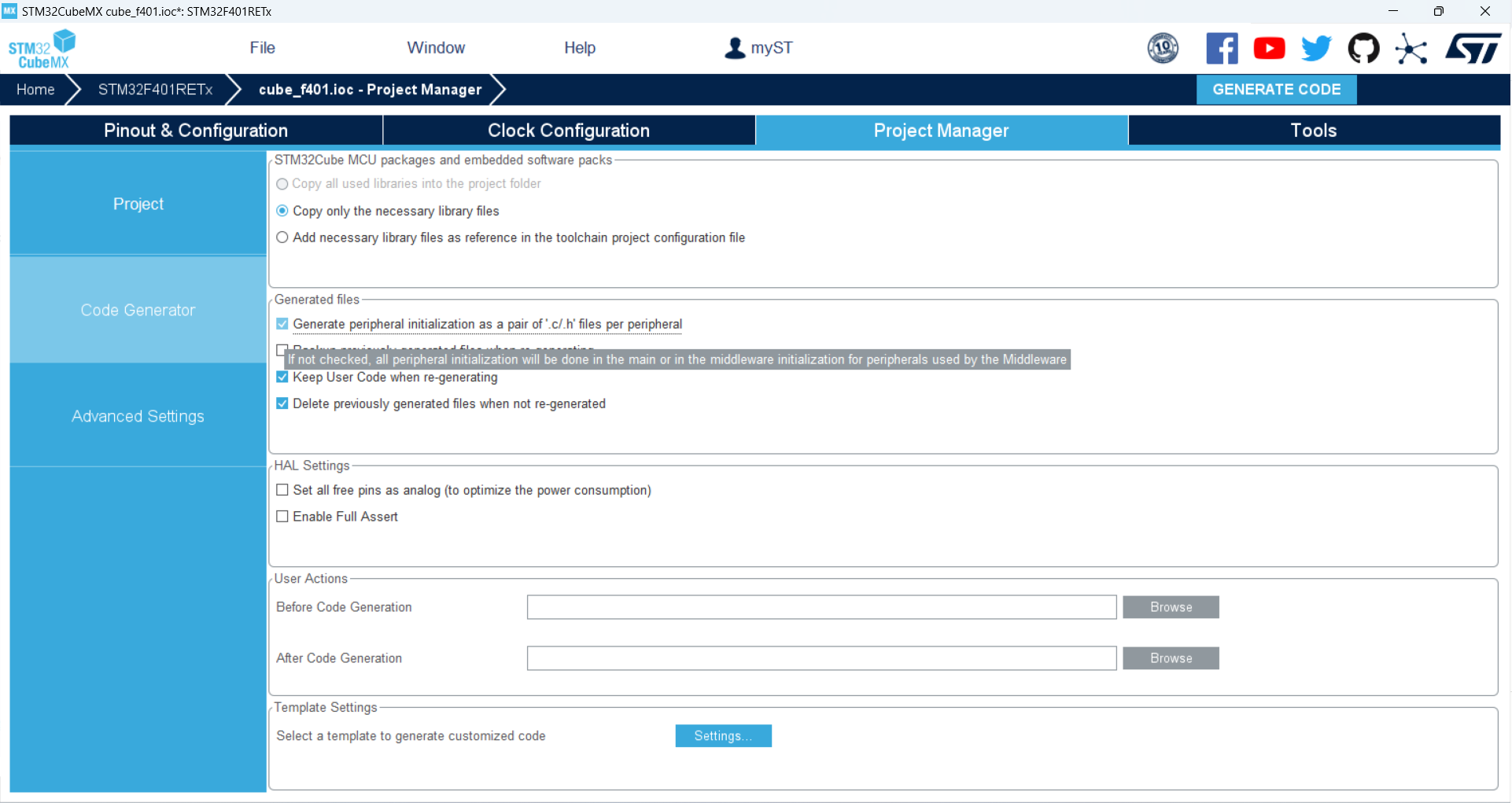
- 왼쪽에 보면 ‘Project’, ‘Code Generator’, ‘Advanced Settings’이라는 메뉴가 보일 것이다.
- 두 번째의 ‘Code Generator’를 선택하고, ‘Generated files’ 영역 안에 가장 첫 번째 것을 선택하여 활성화한다. (Generate peripheral initialization as a pair of ‘.c/.h’ files per peripheral)
- peripheral 마다 별도의 파일을 생성해준다. 활성화하지 않으면 peripheral과 관련된 모든 코드가 main.c 파일에 생성되어 참조하기 불편하다.

- 이후 오른쪽 상단의 GENERATE CODE 버튼을 클릭하면 프로젝트가 생성된다.

- 다운로드가 필요하다고 하여 Yes를 클릭하였다.
- 다운로드를 위해 로그인이 필요한 것 같다.
- 로그인 오류가 발생하여 중앙 상단에 위치한 myST에서 로그인을 진행하였다.
- 로그인을 하니 다운로드가 잘 수행되었다.
- CubeMX에서 생성한 프로젝트를 직접적으로 사용하진 않기에 Close를 눌러준다.
8. STM32CubeIDE에서 CubeMX 활용하기
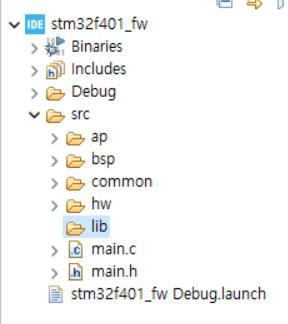
- 이제 다시 STM32CubeIDE로 돌아온다. lib 폴더 내부에 CubeMX 프로젝트를 생성하였는데 보이지 않는다.
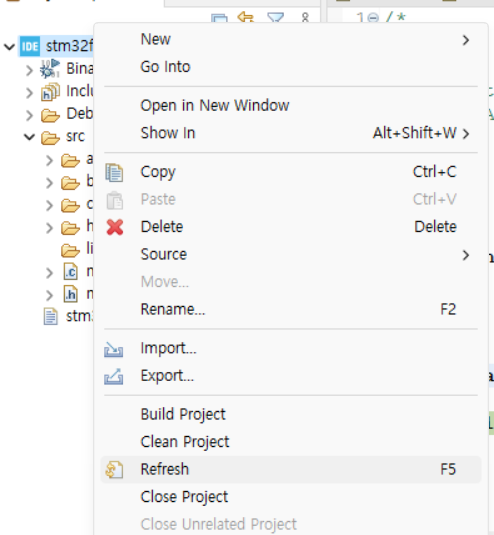
- 프로젝트를 우클릭한 후 Refresh를 클릭한다.
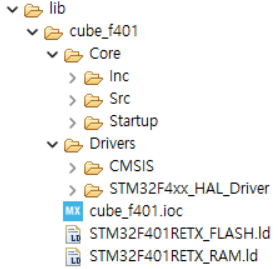
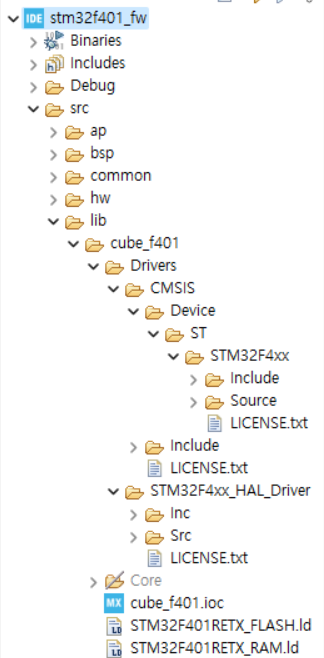
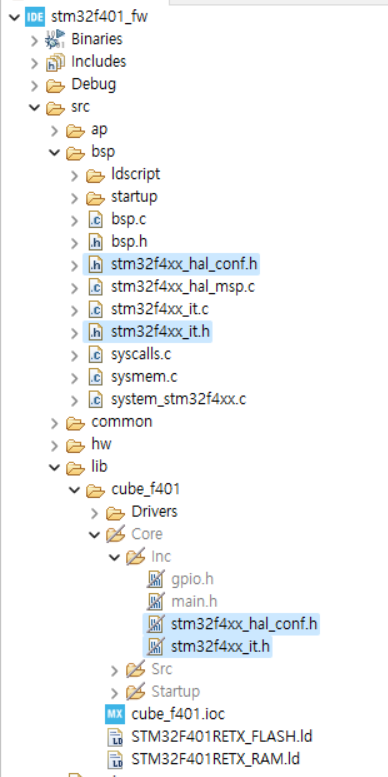
- CubeMX 프로젝트는 위와 같은 구성을 가진다.
8.1. Core 폴더 빌드에서 제외
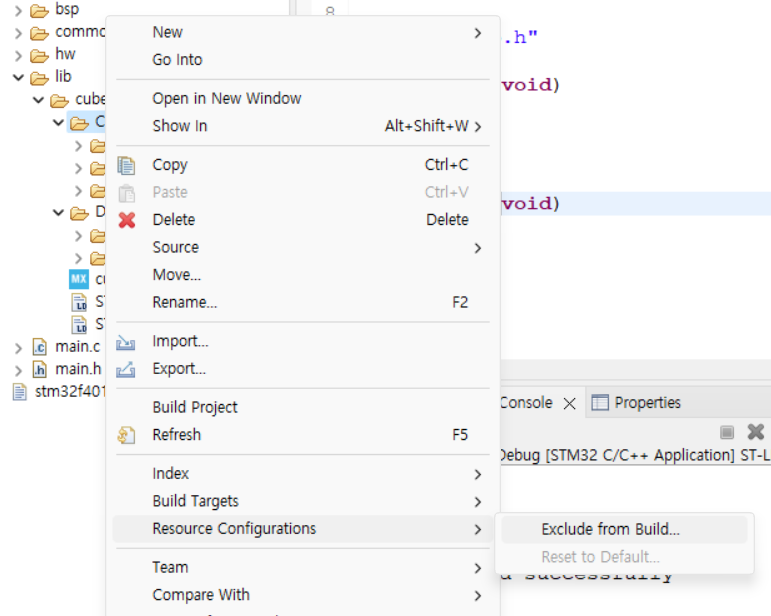
- Core 폴더의 코드는 직접적을 사용하지 않는다. 그래서 빌드에서 제외 시켜줘야 에러가 발생하지 않는다.
- Core 폴더를 우클릭하고, Resource Configuration → Exclude from Build를 클릭한다.
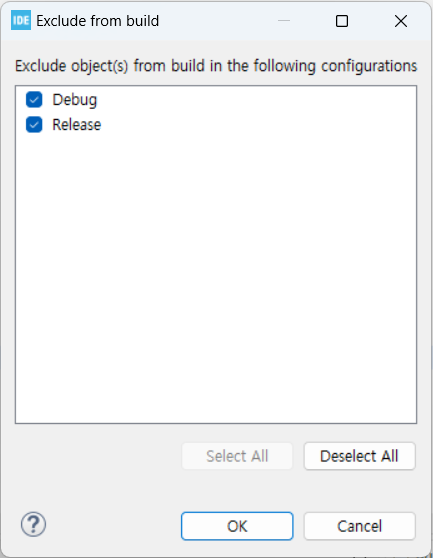
- 모든 곳에서 제외하기 위해 Select All을 누르고 OK 버튼을 클릭한다.
- Core 폴더 전체가 제외된 것을 확인할 수 있다.
8.2. Drivers Include 폴더 경로 추가
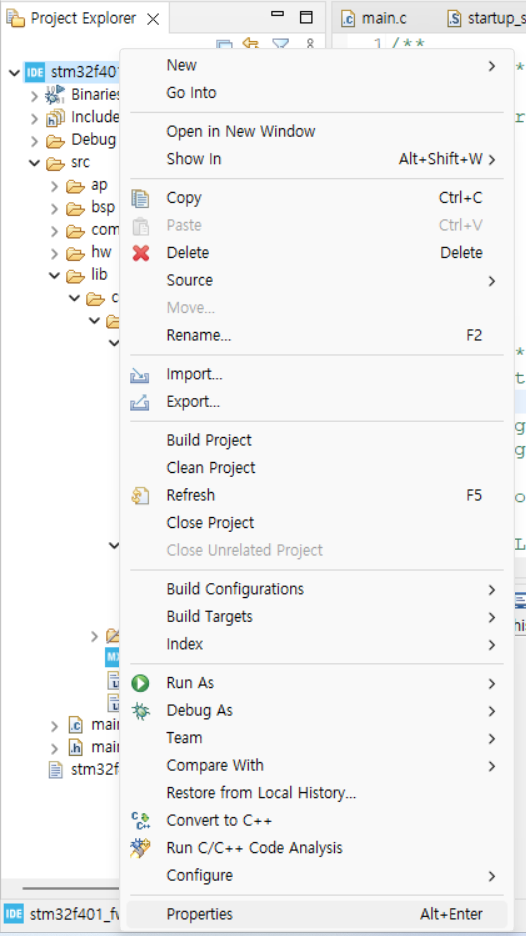
- 프로젝트를 우클릭한 후 Properties를 클릭한다.
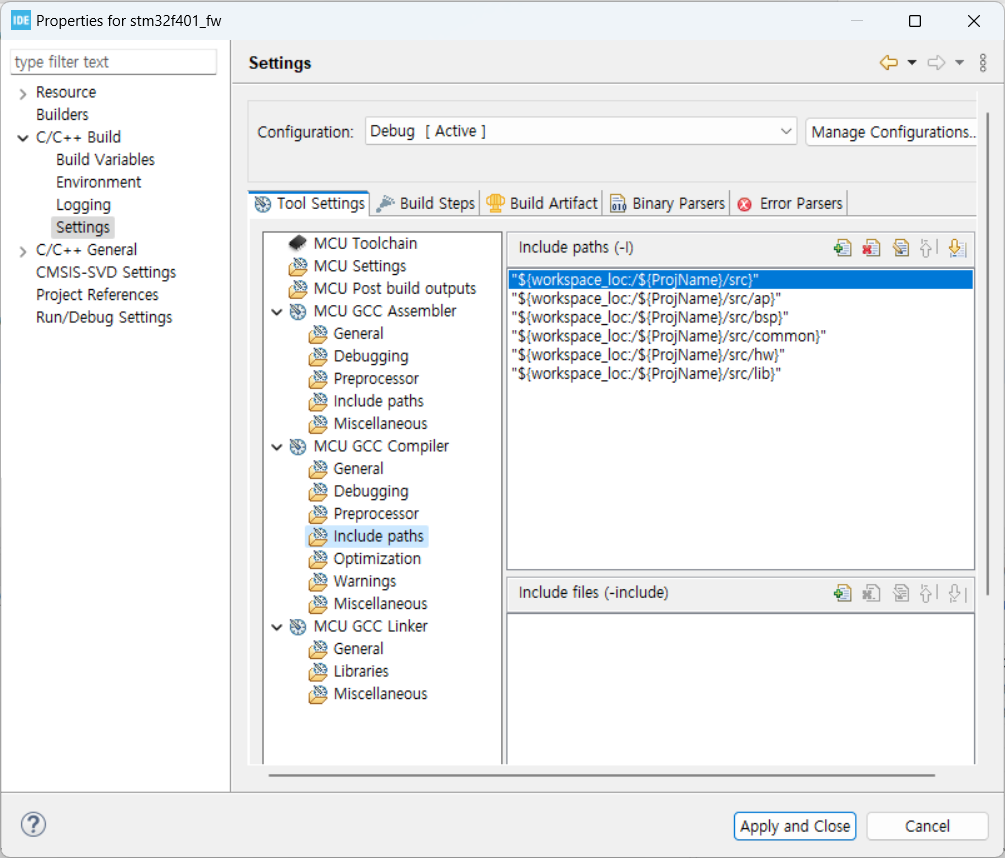
- C/C++ Build → Settings → Tool Settings → MCU GCC Compiler → Include paths 클릭
- path 추가 버튼 클릭
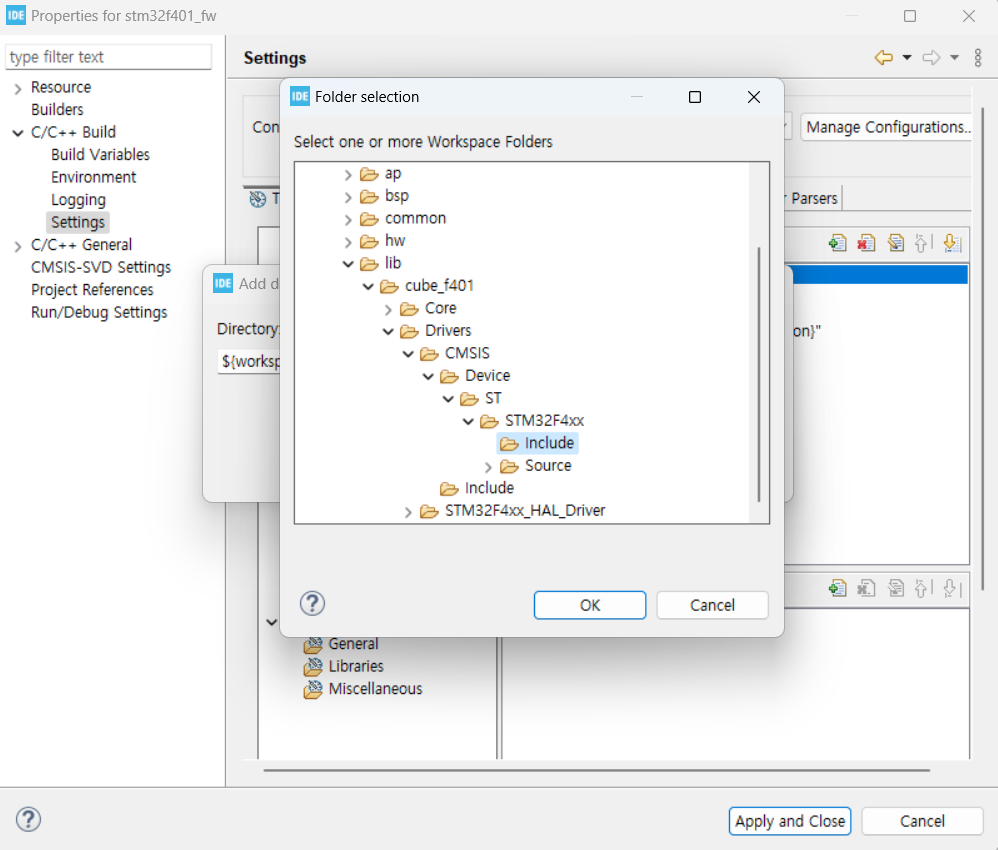
${workspace_loc:/${ProjName}/src/lib/cube_f401/Drivers/CMSIS/Device/ST/STM32F4xx/Include}추가
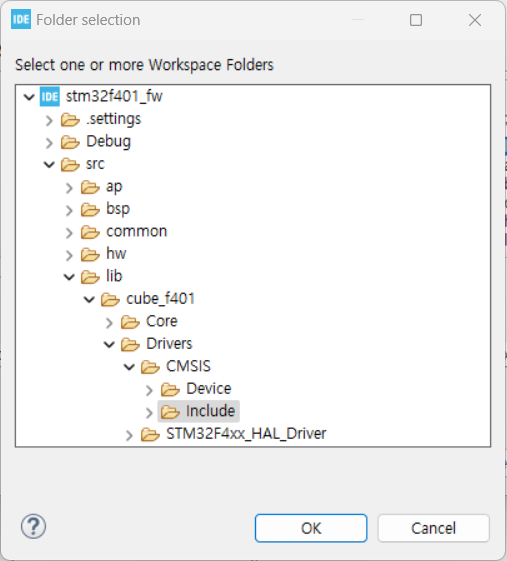
${workspace_loc:/${ProjName}/src/lib/cube_f401/Drivers/CMSIS/Include}추가
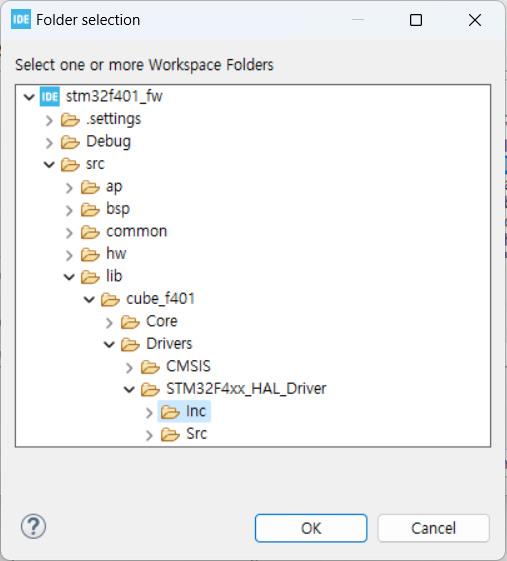
${workspace_loc:/${ProjName}/src/lib/cube_f401/Drivers/STM32F4xx_HAL_Driver/Inc}추가
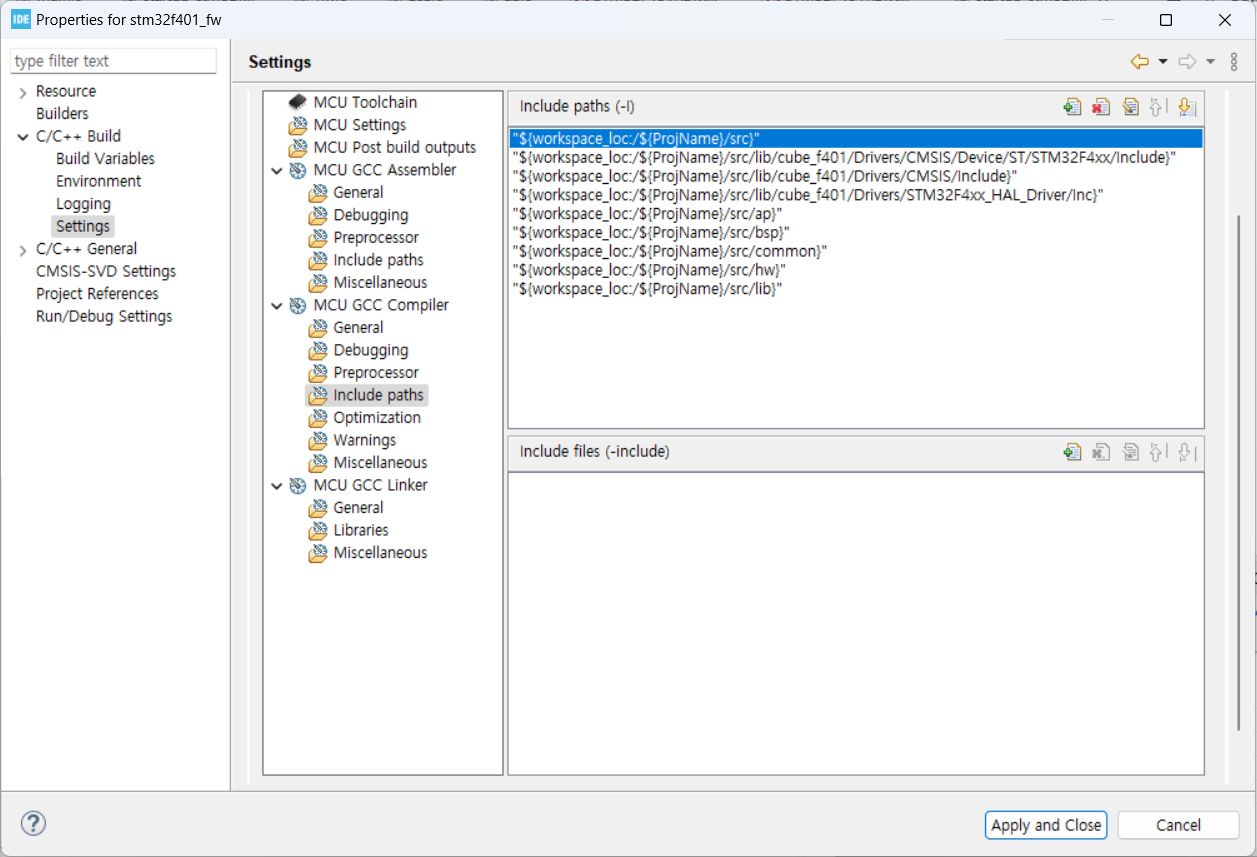
- 총 3개의 경로를 추가한다.
- Apply and Close 버튼 클릭
8.3. HAL Driver MCU 정의
- HAL_Driver는 여러 MCU를 지원한다. 그래서 어떤 MCU를 사용하는지 정의해야 한다.
${workspace_loc:/${ProjName}/src/lib/cube_f401/Drivers/CMSIS/Device/ST/STM32F4xx/Include//stm32f4xx.h}파일 안에 정의하는 부분이 있다.- 사용하는 MCU(
STM32F401RE)가 있는 주석의 정의 부분(STM32F401xE)을 복사한다.
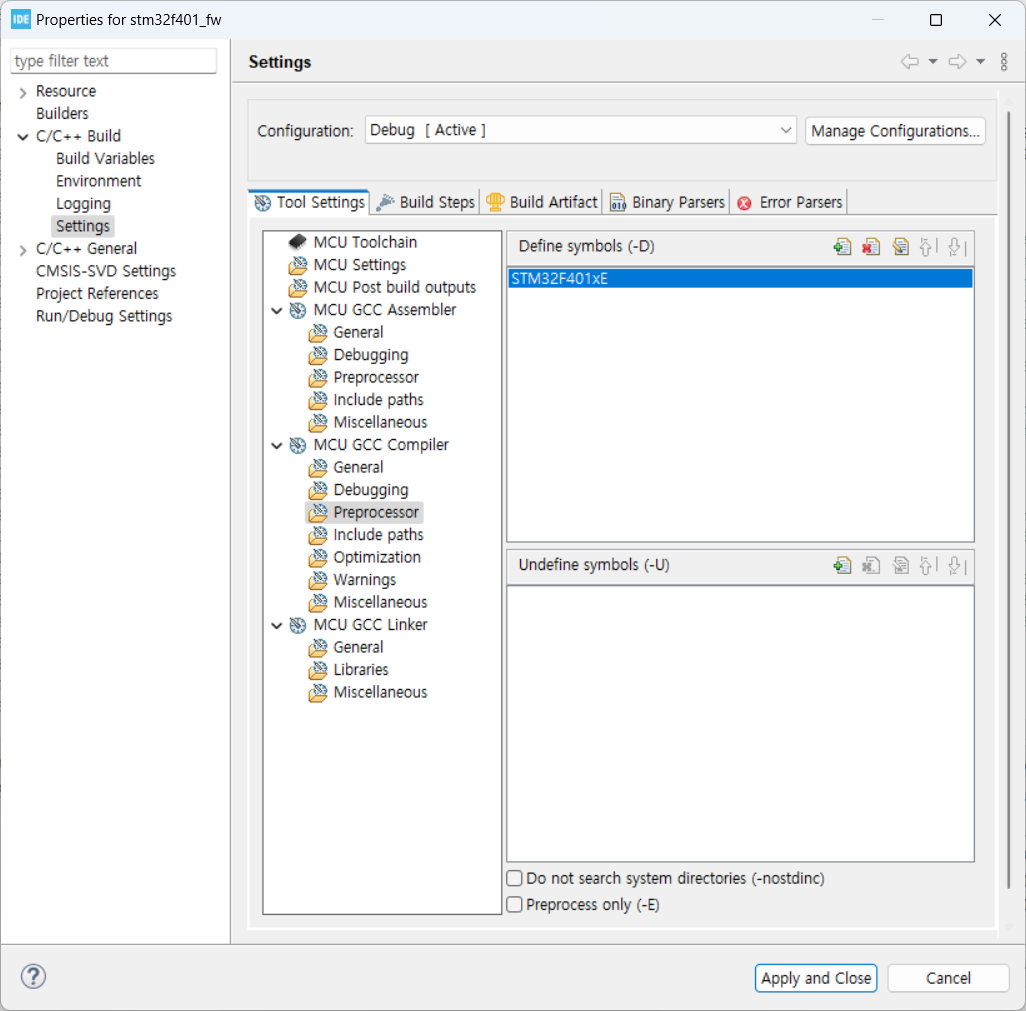
- 프로젝트 우클릭 후 Properties 선택
- C/C++ Build → Settings → Tool Settings → MCU GCC Compiler → Preprocessor 클릭
- 복사한 주석의 정의 부분(
STM32F401xE)을 추가한다.
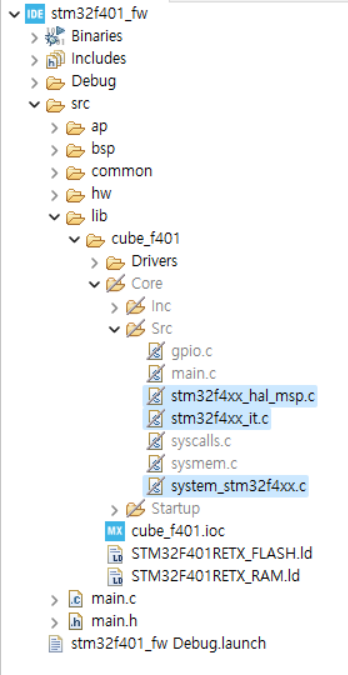
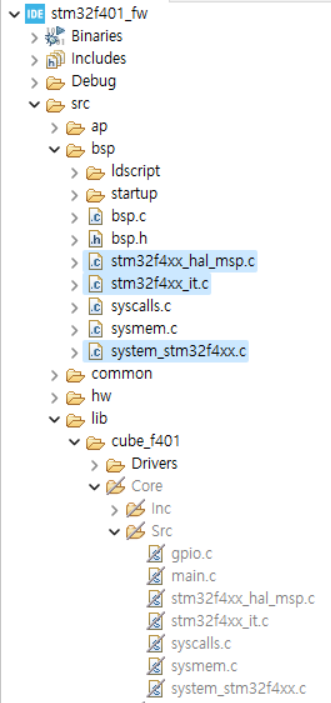
lib/cube_f401/Core/Src폴더 안에 있는 3개의 파일(stm32f4xx_hal_msp.c, stm32f4xx_if.c, system_stm32f4xx.c)을bsp폴더 안에 복사한다.
lib/cube_f401/Core/Inc폴더 안에 있는 2개의 파일(stm32f4xx_hal_conf.h, stm32f4xx_it.h)을bsp폴더 안에 복사한다.stm32f4xx_hal_conf.h에는 주변 장치에 대한 정보가 담겨있다. 새로운 주변 장치를 추가하면 CubeMX 프로젝트가 변경되는데 이때 다시 복사를 진행해야 한다. CubeMX 프로젝트를 직접적으로 사용하지 않기 때문이다.
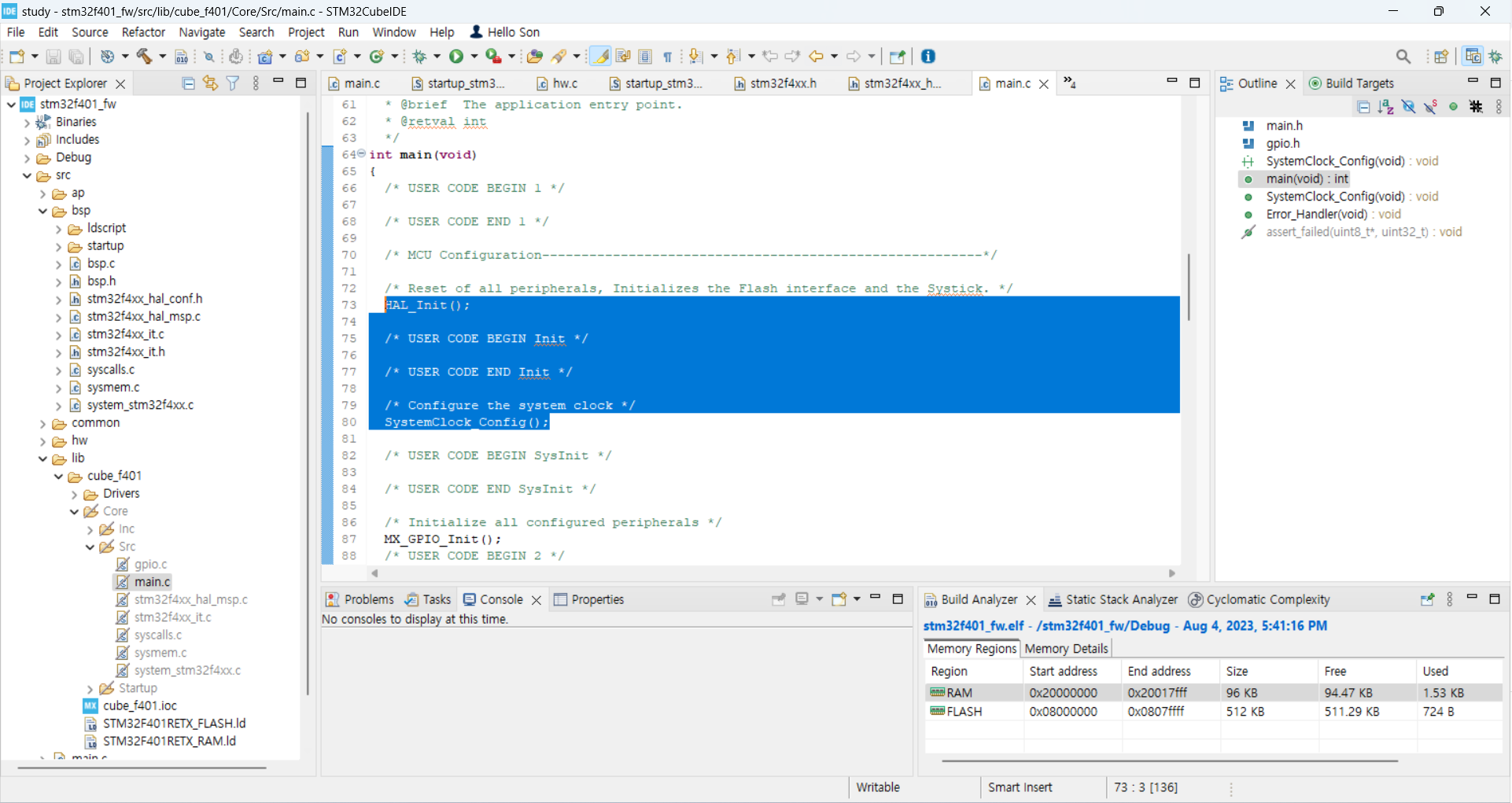
lib/cube_f401/Core/Src/main.c에서 2개의 함수(HAL_Init(), SystemClock_Config())를 복사한 후bsp.c파일에 붙여 넣는다.
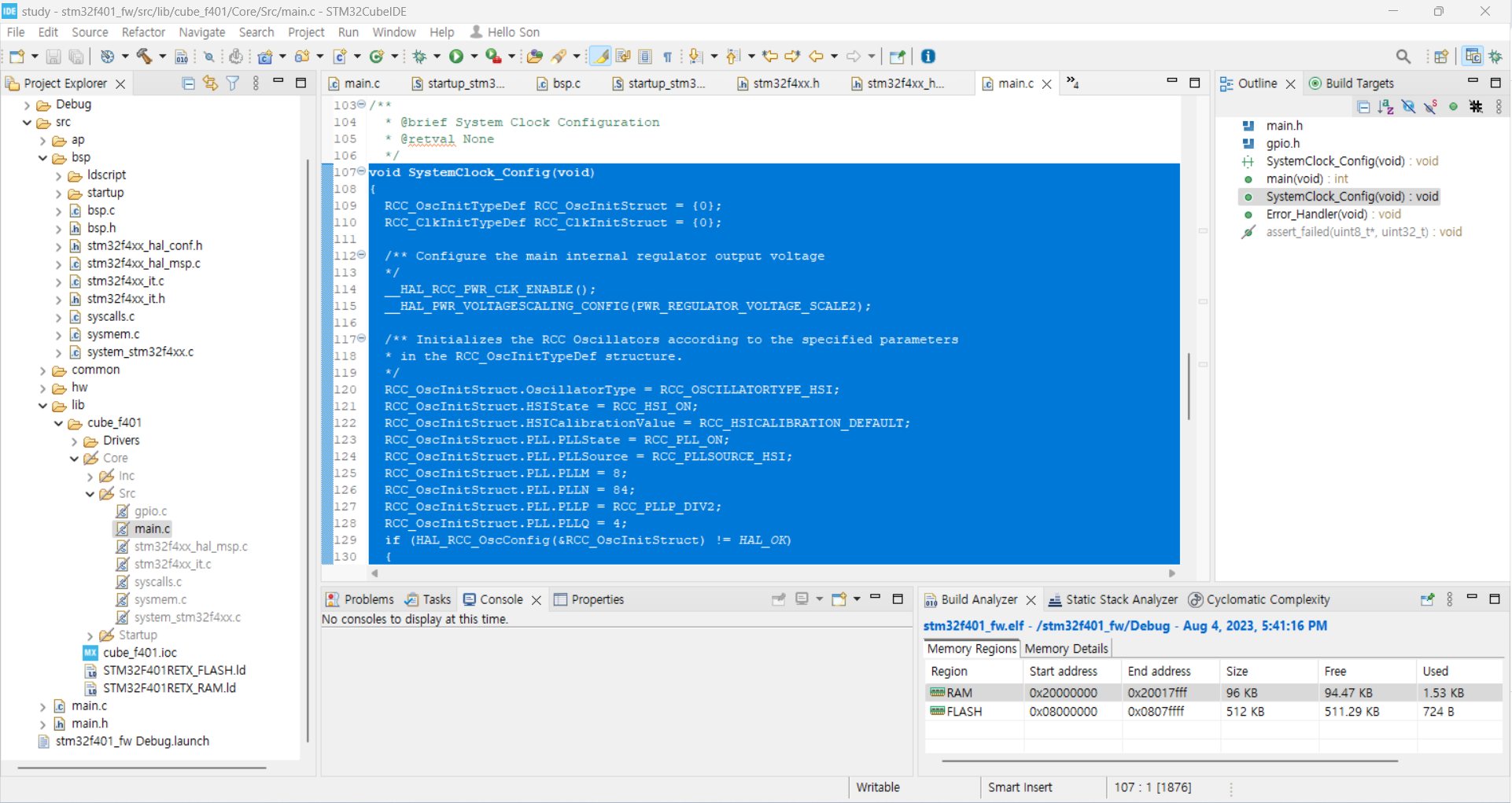
void SystemClock_Config(void)와void Error_Handler(void)함수 복사 후bsp.c파일에 붙여 넣는다.-
SystemClock_Config, Error_Handler
void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Configure the main internal regulator output voltage */ __HAL_RCC_PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE2); /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI; RCC_OscInitStruct.PLL.PLLM = 8; RCC_OscInitStruct.PLL.PLLN = 84; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = 4; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { Error_Handler(); } } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ __disable_irq(); while (1) { } /* USER CODE END Error_Handler_Debug */ }
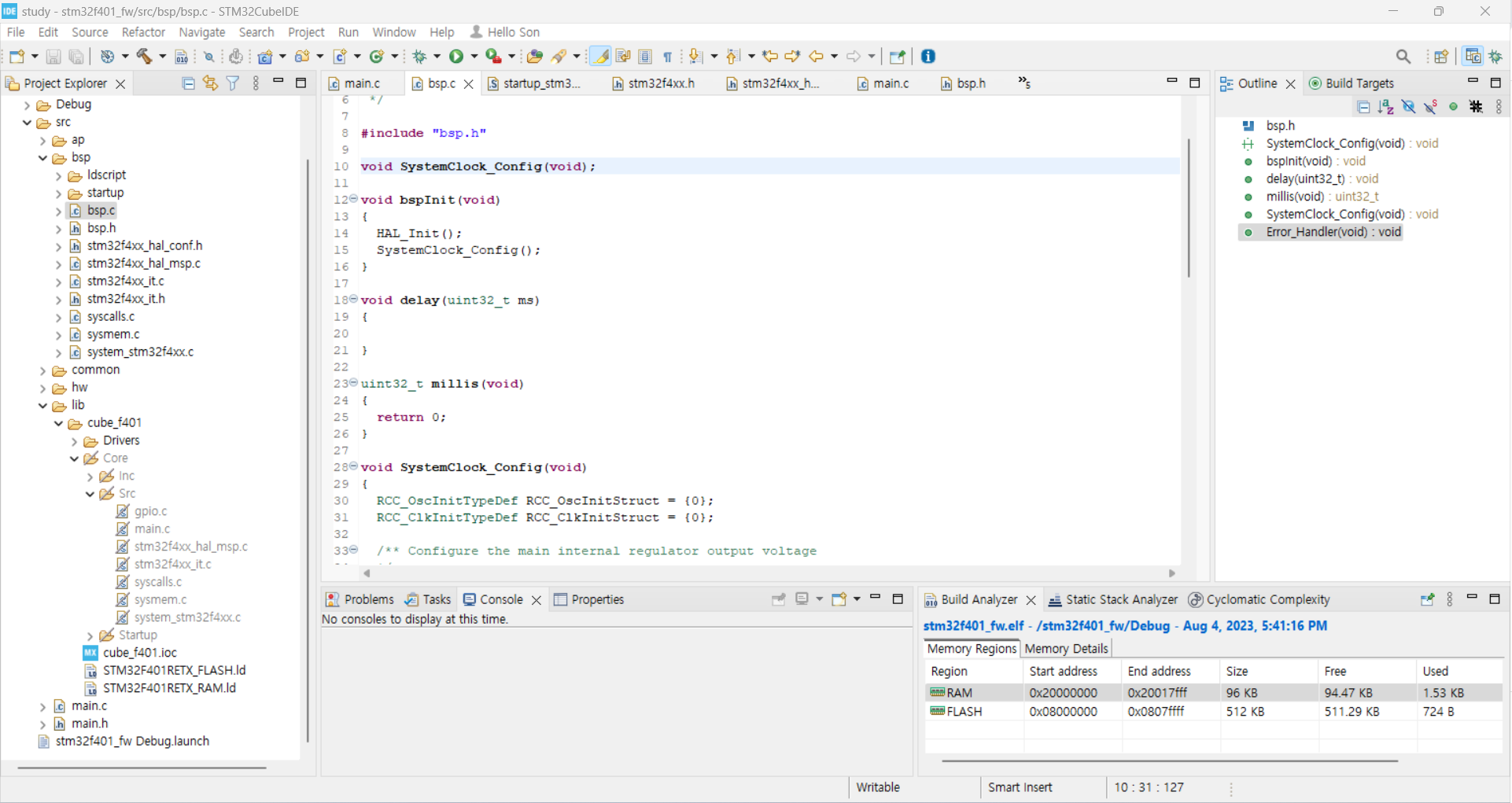
- 우선 복사한 부분을
bsp.c안에 넣고 상단에SystemClock_Config함수의 정의를 추가한다.
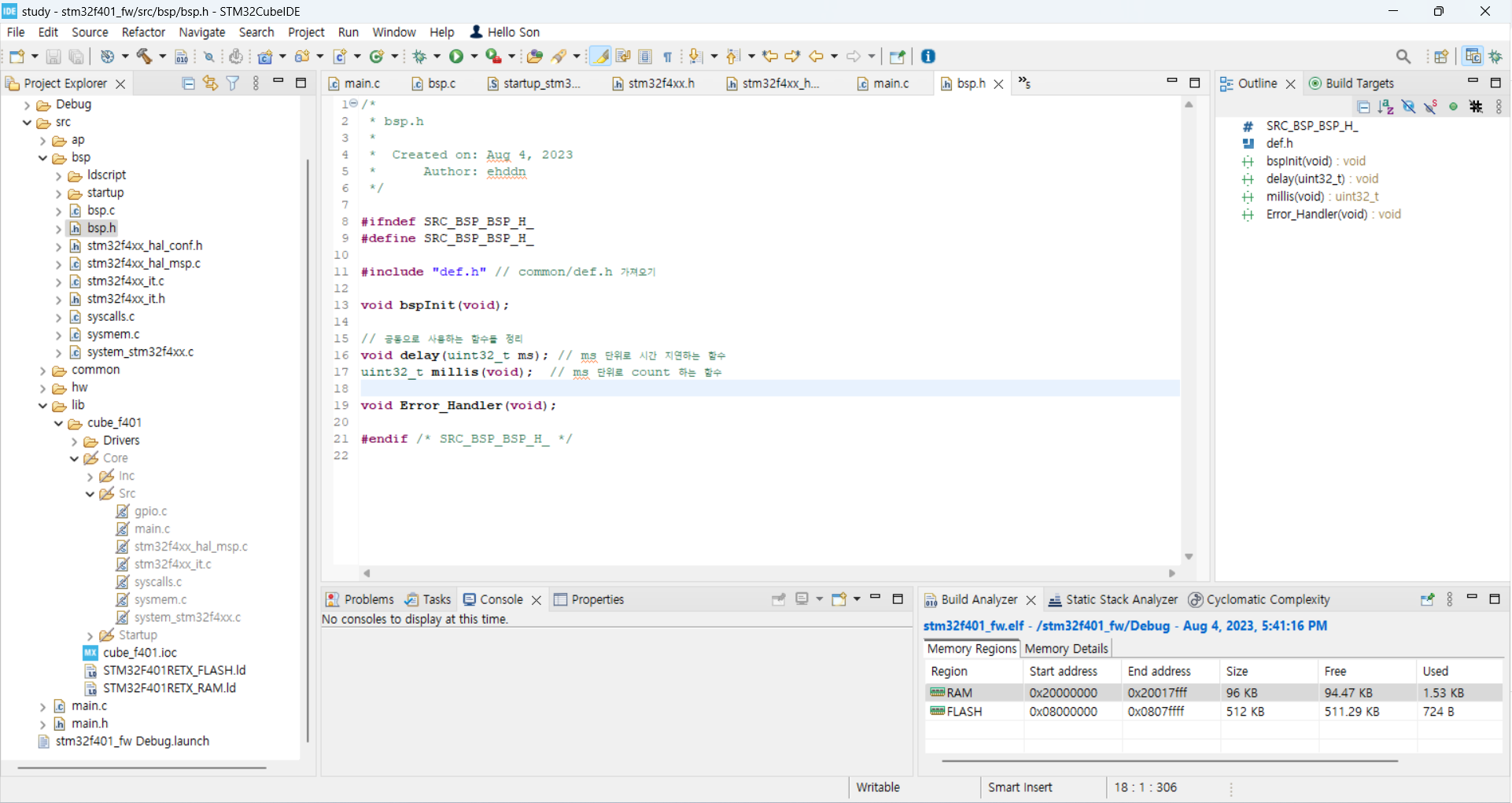
Error_Handler는 다른 곳에서도 호출하는 경우가 있기 때문에bsp.h에 정의한다.
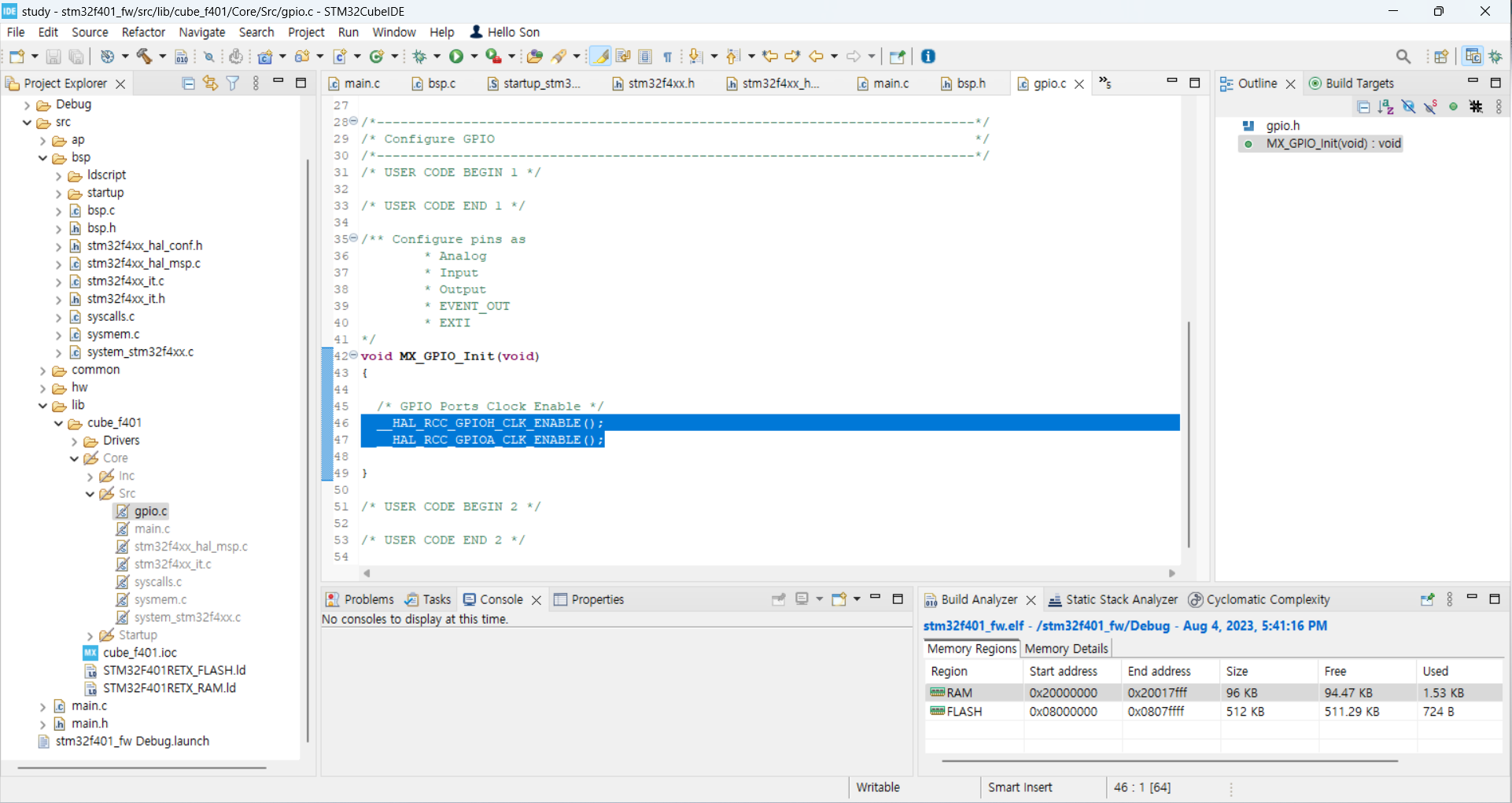
- ST-LINK를 사용하기 때문에 GPIO를 설정해야 한다. GPIO 설정 코드는
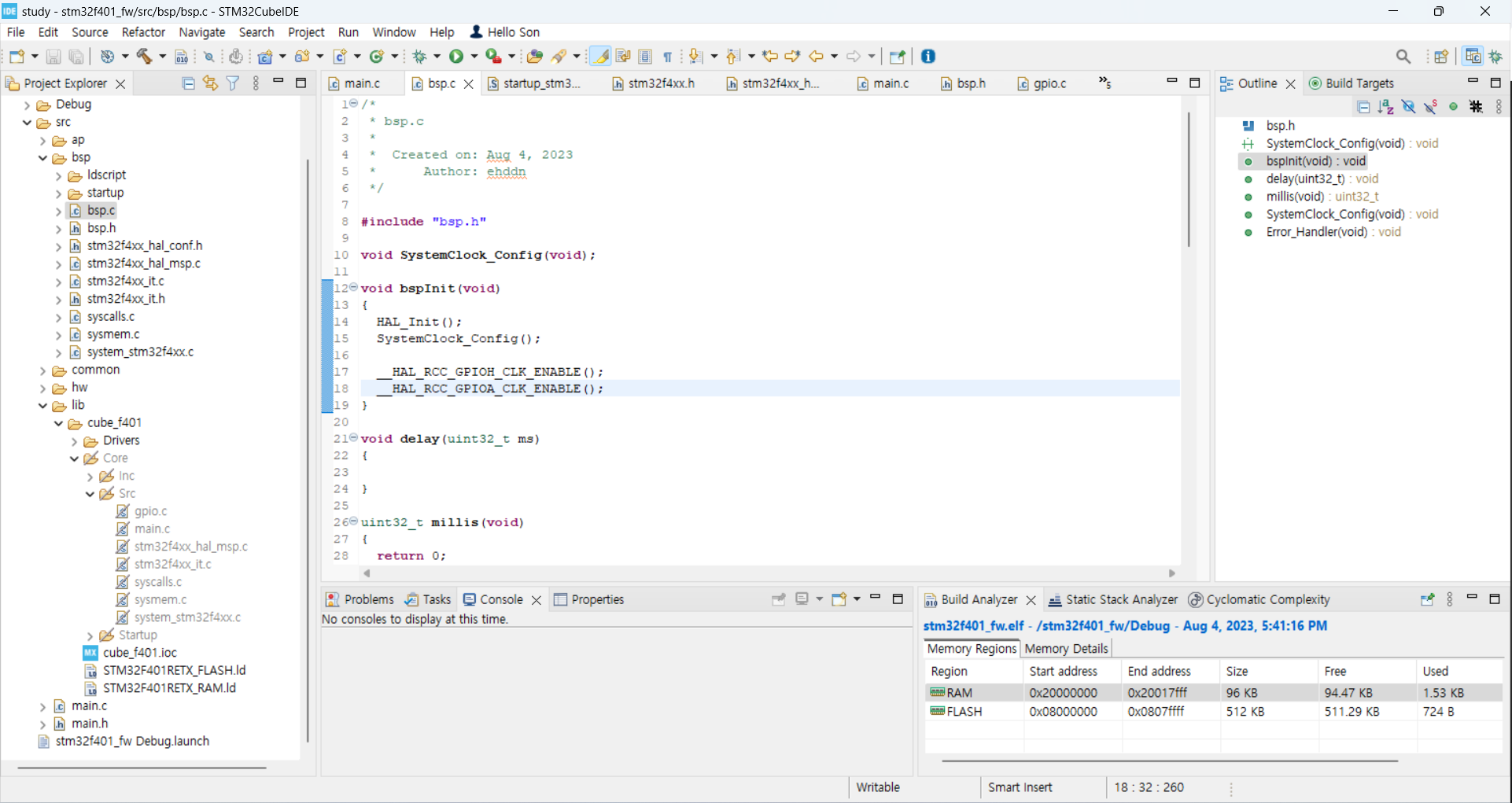
gpio.c에 있다. 사진과 같이 2개의 함수(__HAL_RCC_GPIOH_CLK_ENABLE(), __HAL_RCC_GPIOA_CLK_ENABLE())를 복사하고bsp.c파일 안bspInit함수 내부에 추가한다.
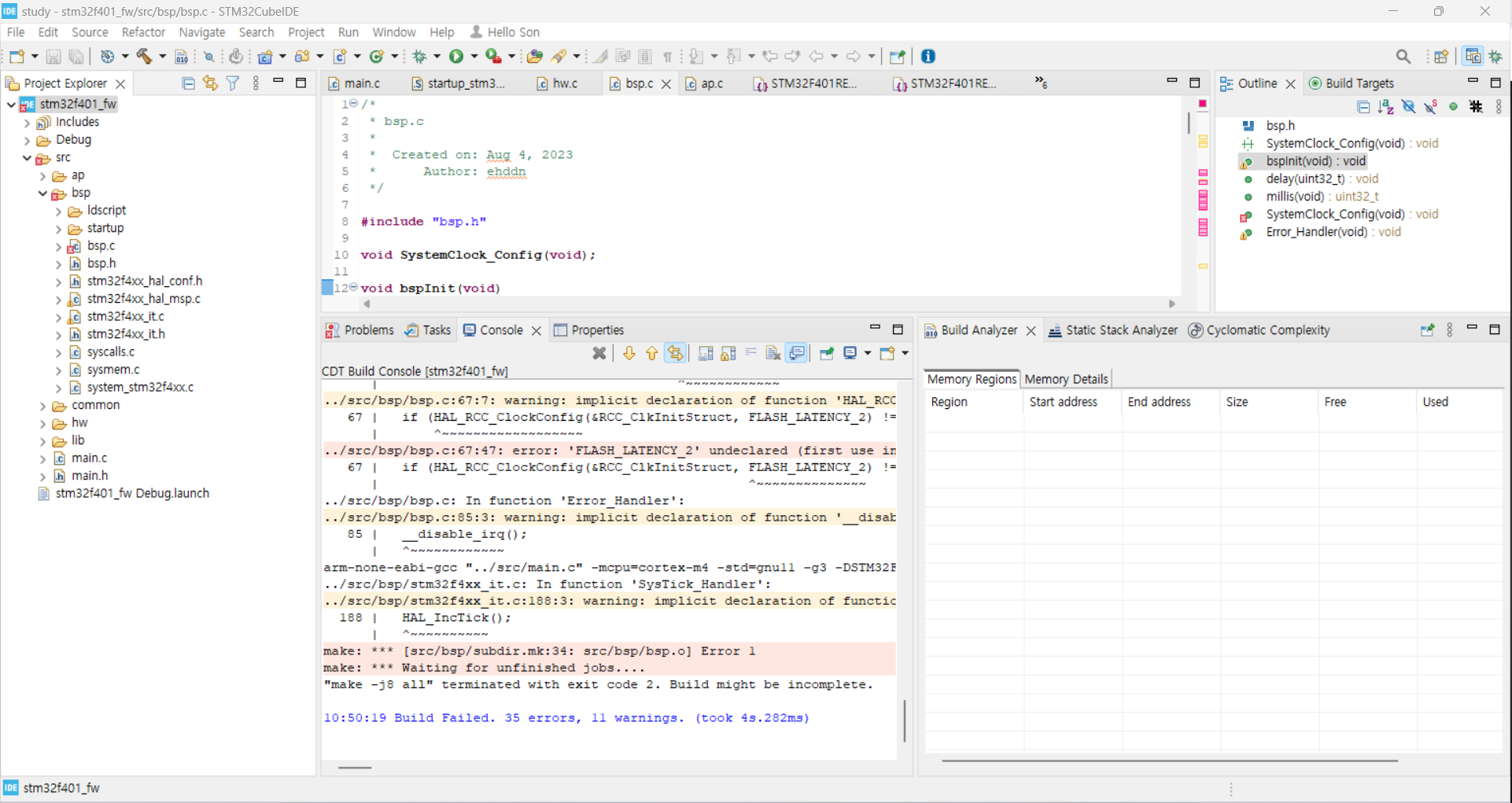
- 이후 빌드를 하니 파일이 없다는 에러가 발생한다.
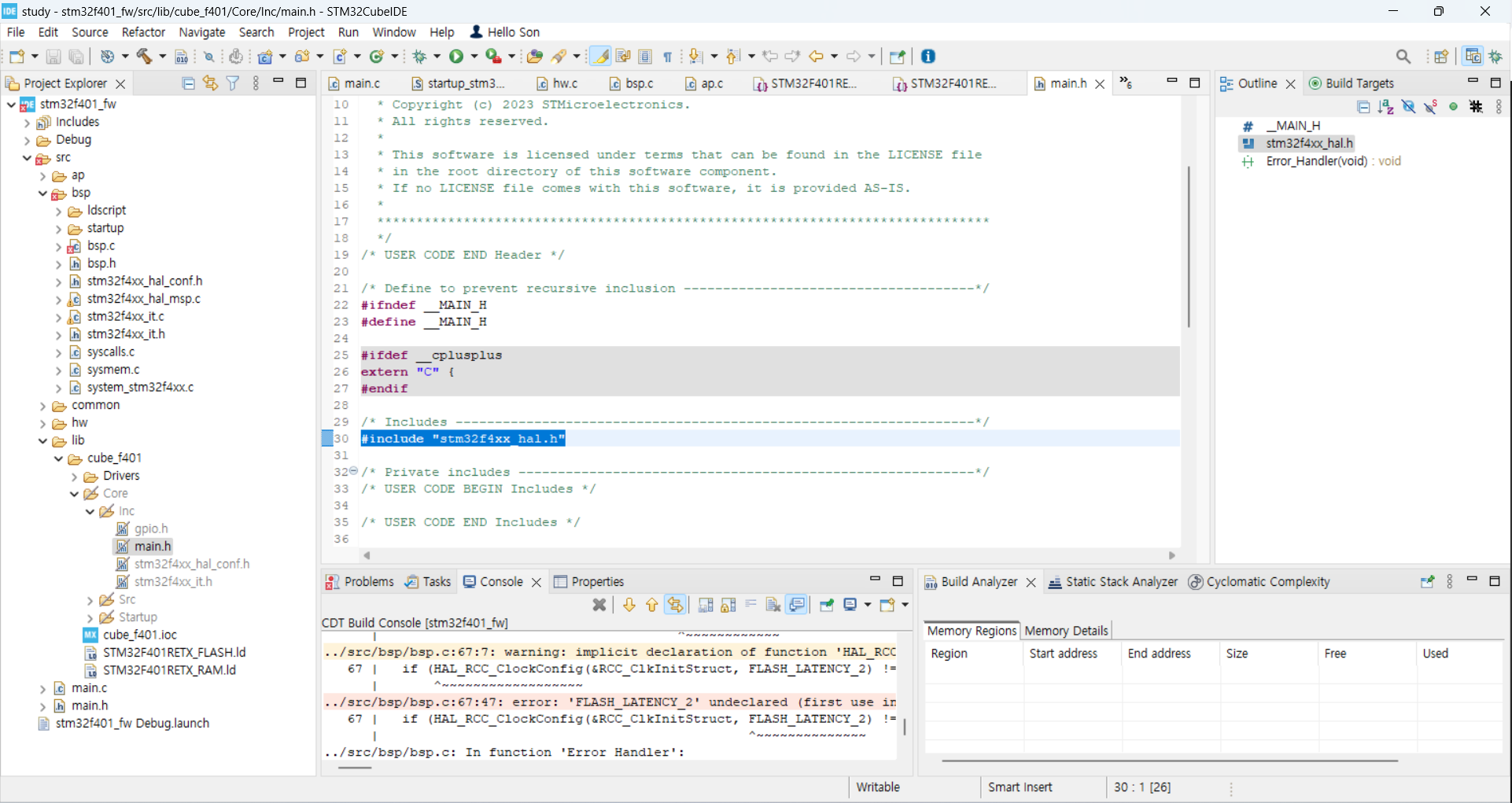
- HAL_Driver를 사용하기 위해 가장 최상위 헤더 파일을 가져와야 한다.
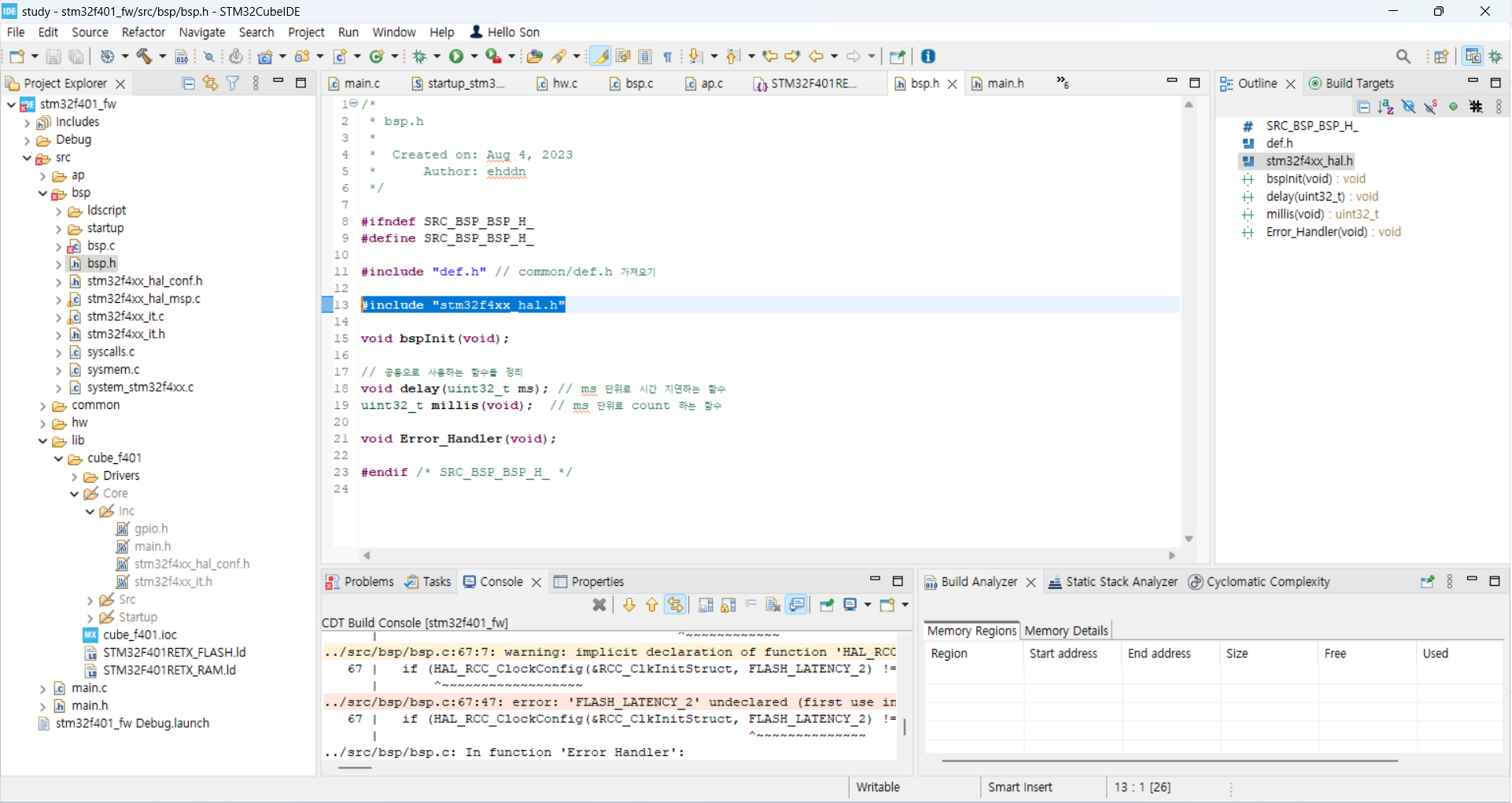
lib/cube_f401/Core/Inc/main.h에 있는#include "stm32f4xx_hal.h"를bsp.h에 복사한다.- 이후 다시 빌드하면 정상적인 것을 확인할 수 있다.
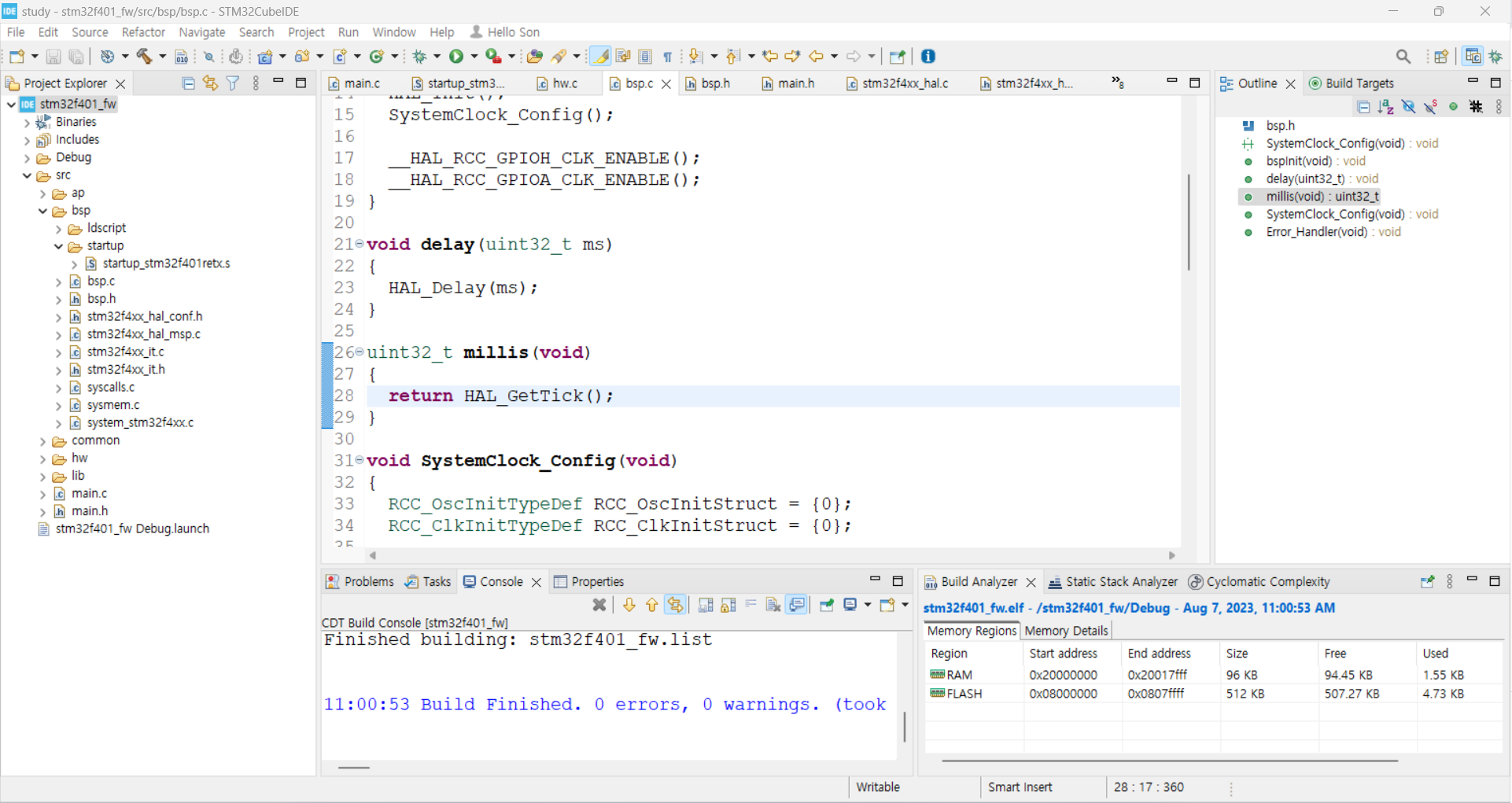
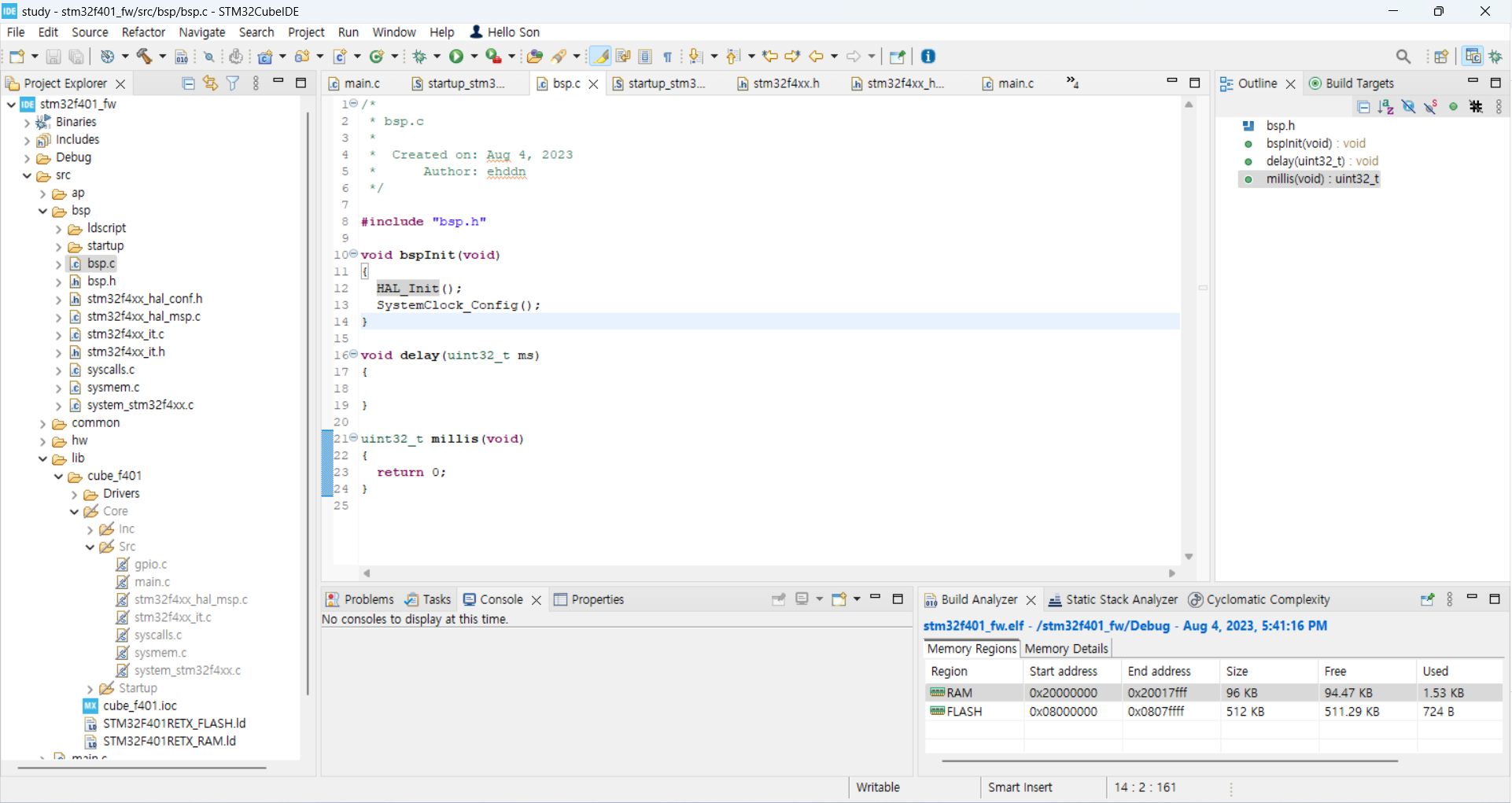
bsp.c파일의delay,millis함수의 정의 부분을 추가한다.- 이후 빌드한다.