[Project#7] 장애물 생성하기
[Project#] 시리즈는 프로젝트(Trash Throwing Simulation with Deep Reinforcement Learning) 제작 과정을 설명한다. 본 포스팅은 Gazebo에 장애물을 생성하는 과정에 대한 내용이다.
모든 내용은 이전 글과 이어진다. 이전 글을 읽어봤다고 가정한 후 글을 작성하였다. (이전 글 LINK)
1. 간단한 모형 생성 후 테스트
1.1. my_obstacle_pkg 생성
cd ~/ros2_ws/src/robotic_arm_environment/
ros2 pkg create --build-type ament_python my_obstacle_pkg
1.2. description 폴더 생성
cd my_obstacle_pkg/
mkdir description
1.3. URDF 파일 생성
cd description/
touch obstacle.urdf
urdf 파일의 내용은 아래와 같다.
<?xml version="1.0"?>
<robot name="obstacle">
<link name="world"/>
<joint name="fixed" type="fixed">
<parent link="world"/>
<child link="link1"/>
</joint>
<link name="link1">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="1 1 1" />
</geometry>
<material name="blue">
<color rgba="0 0 1 1" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="1.01 1.01 1.01" />
</geometry>
</collision>
<inertial>
<mass value="1" />
<inertia ixx= "1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
</robot>
1.4. Launch 파일 생성
-
파일 생성
cd ~/ros2_ws/src/robotic_arm_environment/my_obstacle_pkg/ mkdir launch cd launch/ touch my_obstacle.launch.py -
코드
import os import launch import launch_ros.actions from ament_index_python.packages import get_package_share_directory def generate_launch_description(): pkg_dir = get_package_share_directory('my_obstacle_pkg') urdf_path = os.path.join(pkg_dir, 'description', 'obstacle.urdf') urdf = open(urdf_path).read() robot_state_publisher_node = launch_ros.actions.Node( name="robot_state_publisher", package="robot_state_publisher", executable="robot_state_publisher", parameters=[{"robot_description": urdf}] ) return launch.LaunchDescription([robot_state_publisher_node])
1.5. setup.py 수정
- launch, urdf 파일 경로 설정
- 구체적으로는 import 추가 및 data_files에 launch 파일 경로와 urdf 파일 경로 생성
import os
from glob import glob
from setuptools import setup
package_name = 'my_obstacle_pkg'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob(os.path.join('launch', '*.launch.py'))),
(os.path.join('share', package_name, 'models', 'urdf'), glob(os.path.join('models','urdf', '*.urdf')))
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='dndqodqks',
maintainer_email='dndqodqks@gmail.com',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
],
},
)
1.6. Rviz에 출력하기
-
launch 파일 실행
rf cb ros2 launch my_obstacle_pkg my_obstacle.launch.py -
rivz 실행
# 새 터미널 rf rviz2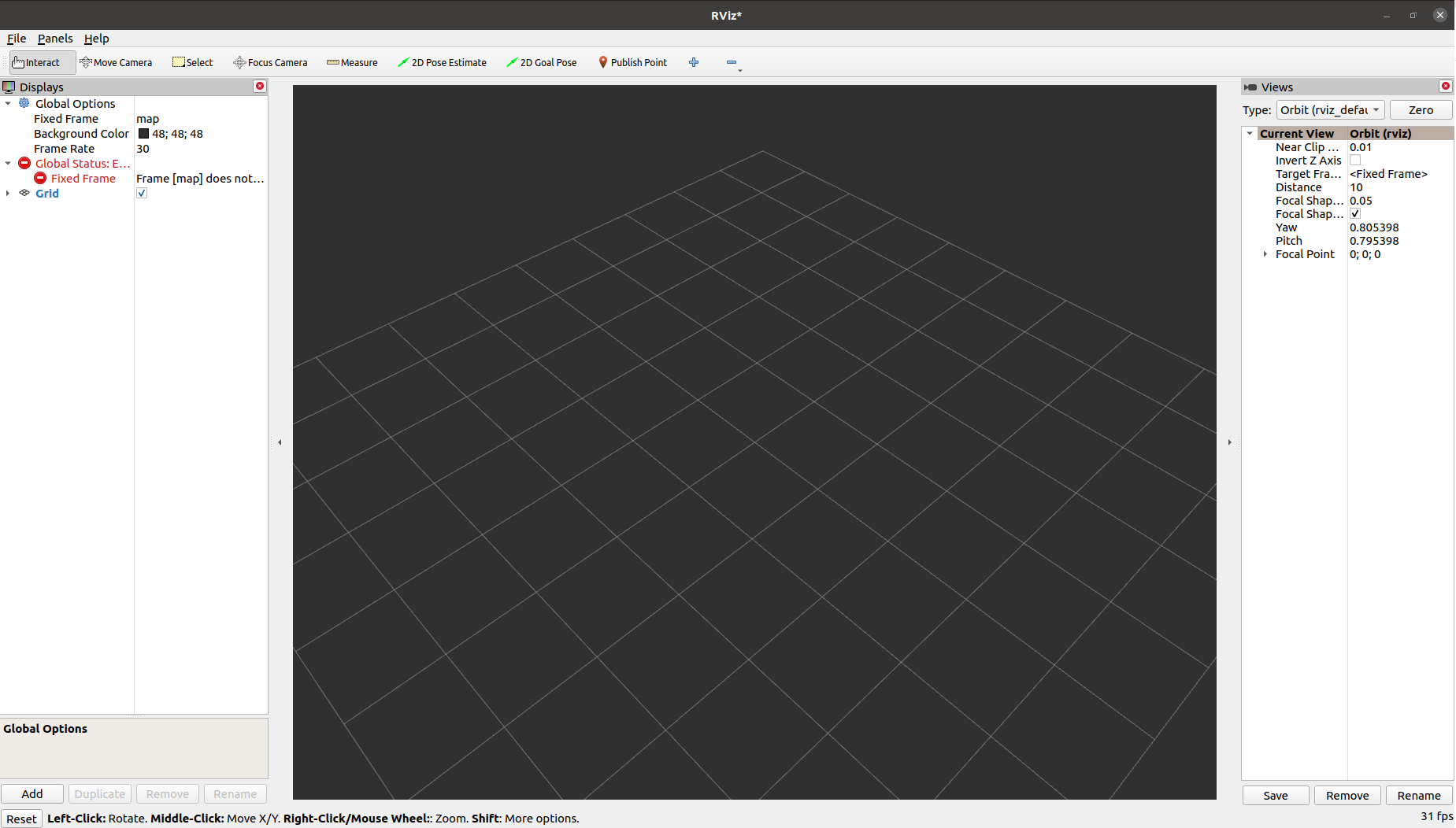
-
Fixed Frame 설정
Displays에서 Fixed Frame을 확인하고자 하는 프레임으로 변경한다. 여기선 link1로 설정하였다.
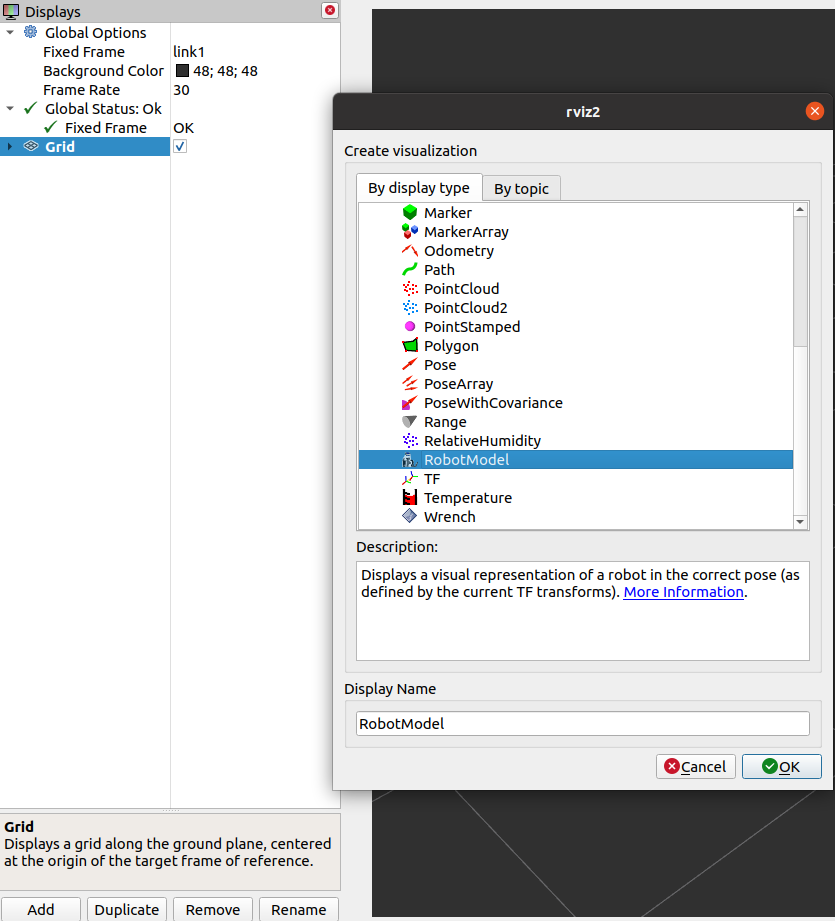
-
RobotModel 추가
왼쪽 아래 부분에 Add 버튼이 있다. Add 버튼을 누르면 시각화를 위한 다양한 도구들이 있다. 여기서 RobotModel을 클릭하고 OK 버튼을 누른다.
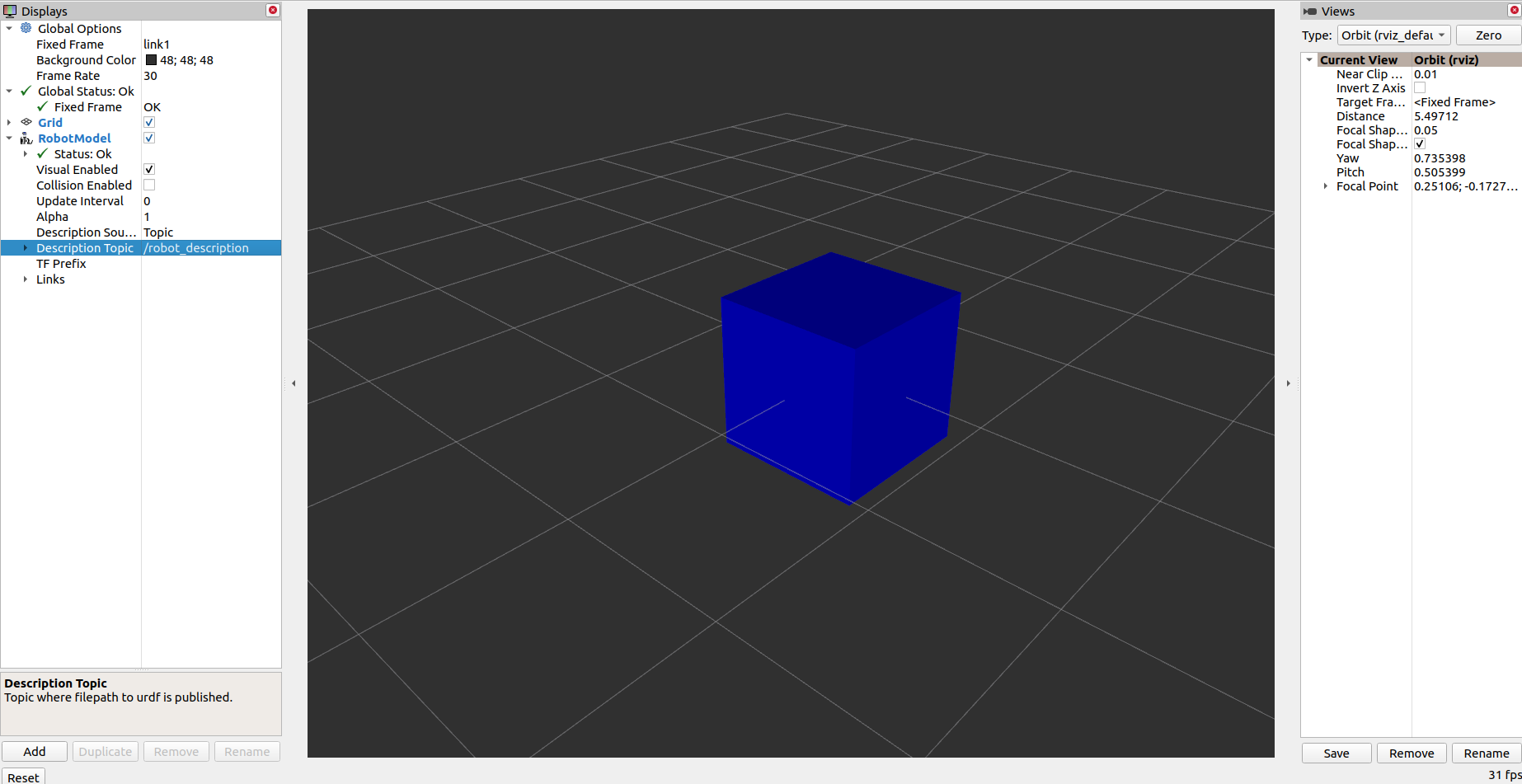
-
Description Topic 설정
RobotModel을 클릭하면 내부에 Description Topic이라는 부분이 보인다. /robot_description 으로 변환하면 URDF 파일을 시각적으로 볼 수 있다.
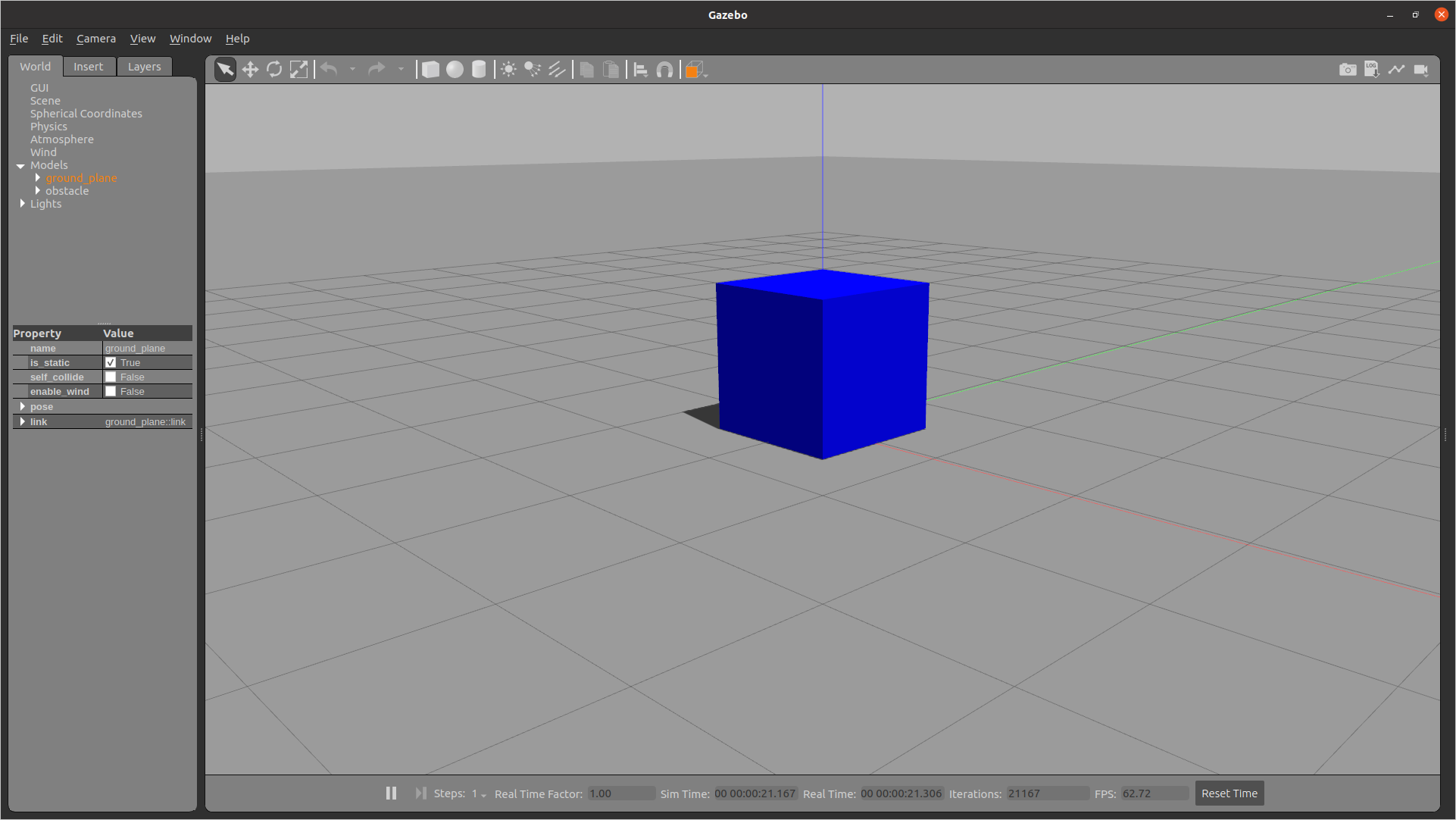
2. Gazebo에 출력해보기
2.1. URDF 파일 수정
- gazebo에서 색상과 출력 위치를 수정한다.
- gazebo 플러그인을 추가하여 색상을 적용한다.
- xzy를 0 0 0으로 설정하면 world와 물체가 겹쳐서 세탁기 돌아가듯이 회전한다. 그래서 z축의 좌표를 0.5로 설정하였다.
<?xml version="1.0"?>
<robot name="obstacle">
<link name="world"/>
<joint name="fixed" type="fixed">
<parent link="world"/>
<child link="base_0"/>
</joint>
<link name="base_0">
<visual>
<origin xyz="0 0 0.5" rpy="0 0 0" />
<geometry>
<box size="1 1 1" />
</geometry>
<material name="blue">
<color rgba="0 0 1 1" />
</material>
</visual>
<collision>
<origin xyz="0 0 0.5" rpy="0 0 0" />
<geometry>
<box size="1.01 1.01 1.01" />
</geometry>
</collision>
<inertial>
<mass value="1" />
<inertia ixx= "1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<gazebo reference="base_0">
<material>Gazebo/Blue</material>
</gazebo>
</robot>
2.2. 런치 파일 수정
- robot_description 토픽을 바탕으로 장애물을 출력하는 노드를 생성한다.
- Gazebo 실행 노드를 추가한다.
import os
import launch
from launch_ros.actions import Node
from launch.actions import ExecuteProcess
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
pkg_dir = get_package_share_directory('my_obstacle_pkg')
urdf_path = os.path.join(pkg_dir, 'description', 'obstacle.urdf')
urdf = open(urdf_path).read()
robot_state_publisher_node = Node(
name="robot_state_publisher",
package="robot_state_publisher",
executable="robot_state_publisher",
parameters=[{"robot_description": urdf}]
)
spawn_entity_obstacle = Node(package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-entity', 'obstacle', '-topic', 'robot_description'],
output='screen')
gazebo_node = ExecuteProcess(cmd=['gazebo', '-s', 'libgazebo_ros_factory.so'], output='screen')
return launch.LaunchDescription([robot_state_publisher_node, spawn_entity_obstacle, gazebo_node])
2.3. 빌드 후 런치 파일 실행
rf
cb
ros2 launch my_obstacle_pkg my_obstacle.launch.py
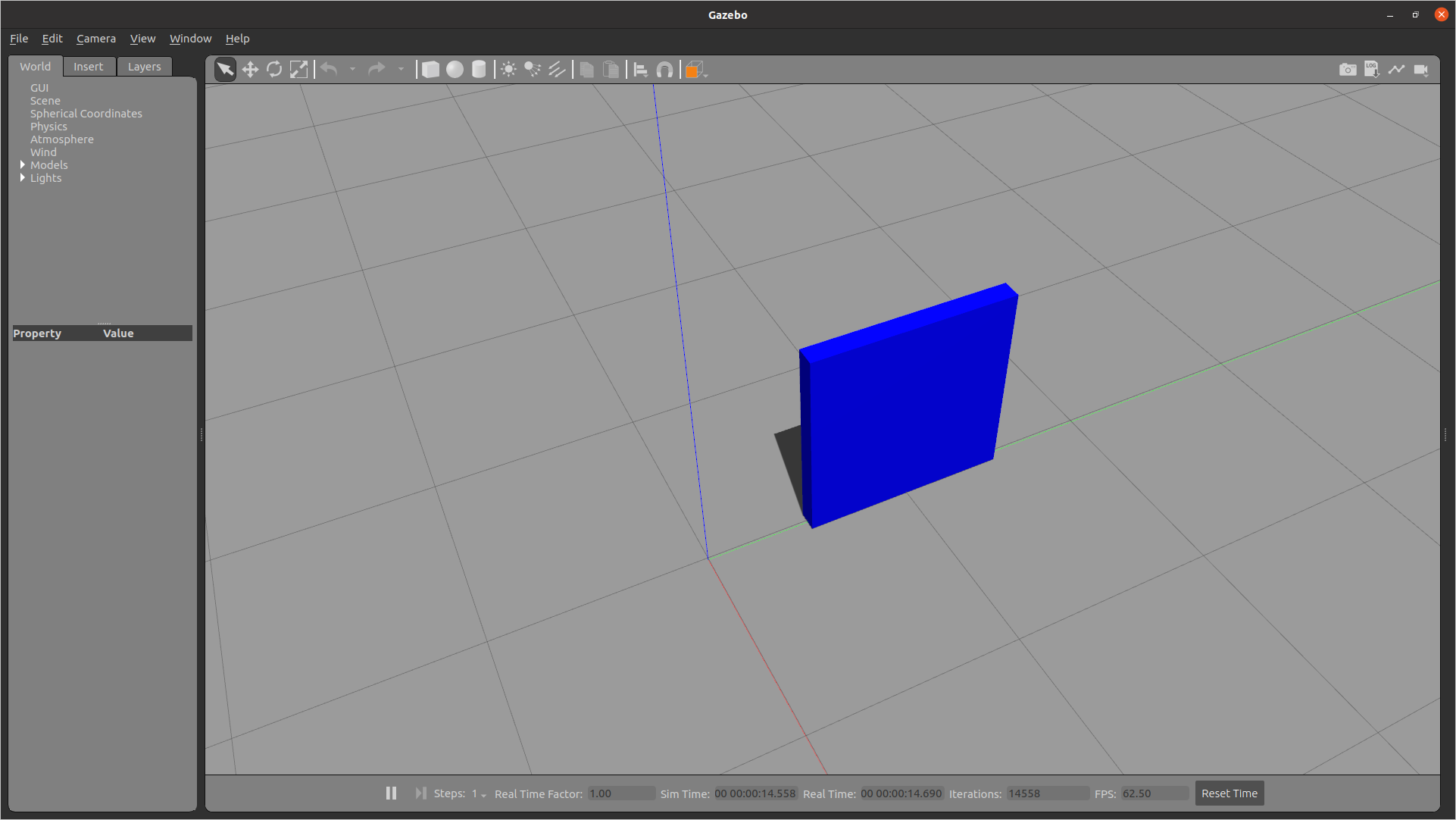
3. 장애물 형태, 좌표 수정 및 메인 런치 파일에 결합하기
3.1. URDF 파일 수정
- 장애물 형태 및 좌표 수정
<?xml version="1.0"?>
<robot name="obstacle">
<link name="world"/>
<joint name="fixed" type="fixed">
<parent link="world"/>
<child link="base_0"/>
<origin xyz="0 1.1 0.5" rpy="0 0 0" />
</joint>
<link name="base_0">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 1 1" />
</geometry>
<material name="blue">
<color rgba="0 0 1 1" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.1 1 1" />
</geometry>
</collision>
<inertial>
<mass value="1" />
<inertia ixx= "1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<gazebo reference="base_0">
<material>Gazebo/Blue</material>
</gazebo>
</robot>
3.2. my_obstacle.launch.py 파일 수정
- 스폰하는 코드만 남기고 모두 삭제하였다. 또한, urdf_path를 넣어서 스폰한다.
import os
import launch
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
pkg_dir = get_package_share_directory('my_obstacle_pkg')
urdf_path = os.path.join(pkg_dir, 'description', 'obstacle.urdf')
spawn_entity_obstacle = Node(package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-entity', 'obstacle', '-file', urdf_path],
output='screen')
return launch.LaunchDescription([spawn_entity_obstacle])
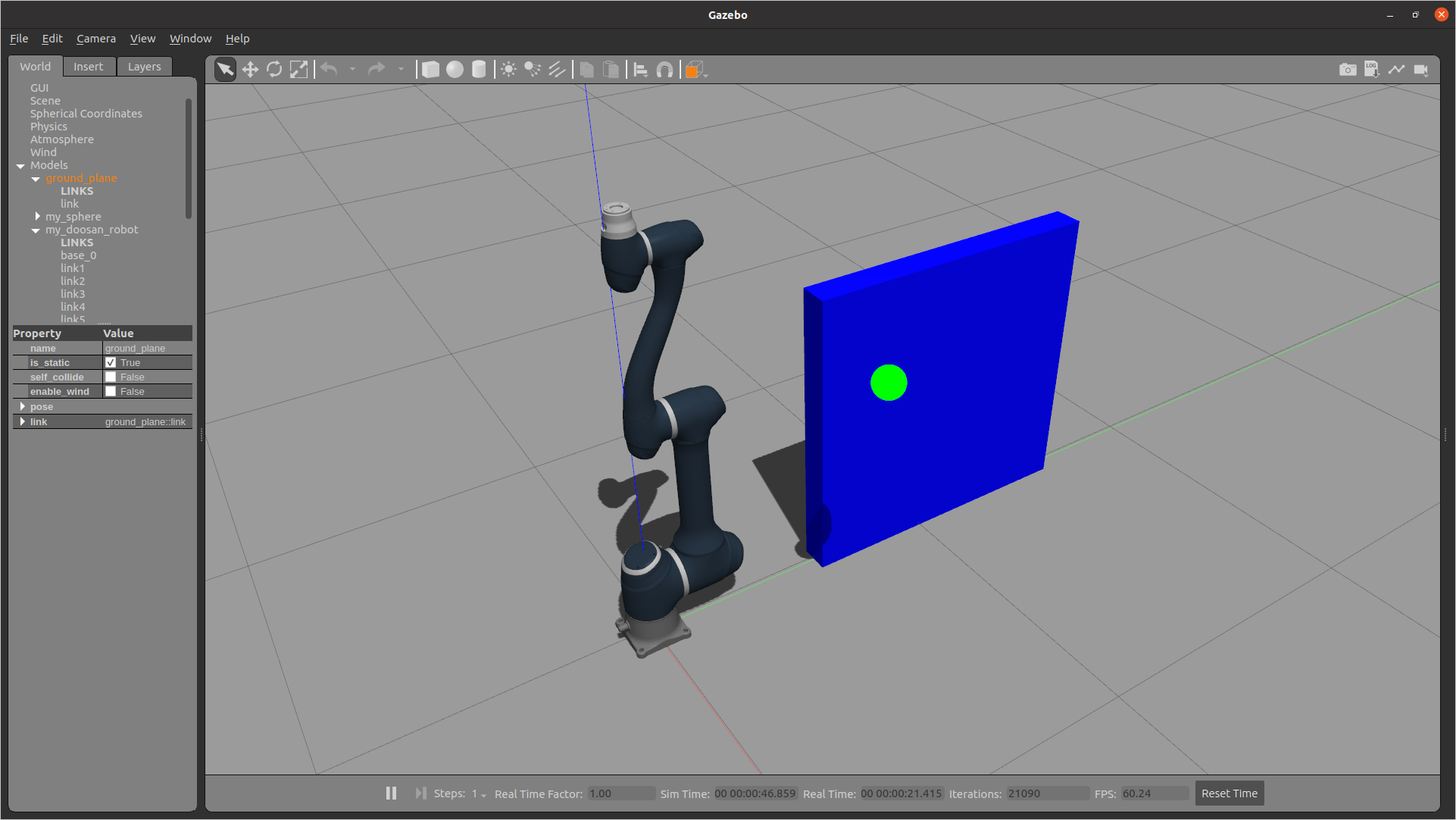
3.3. my_environment.launch.py 파일 수정
- obstacle_object를 생성하는 노드를 추가한다.
import os
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.actions import ExecuteProcess
def generate_launch_description():
my_doosan_robot_files = get_package_share_directory('my_doosan_pkg')
my_sphere_files = get_package_share_directory('my_sphere_pkg')
my_obstacle_files = get_package_share_directory('my_obstacle_pkg')
my_environmets_files = get_package_share_directory('my_environment_pkg')
# Start doosan robot and controller
doosan_robot = IncludeLaunchDescription(PythonLaunchDescriptionSource(my_doosan_robot_files + '/launch/my_doosan_controller.launch.py'))
# Start sphere mark
sphere_mark = IncludeLaunchDescription(PythonLaunchDescriptionSource(my_sphere_files + '/launch/my_sphere.launch.py'))
# Start obstacle object
obstacle_object = IncludeLaunchDescription(PythonLaunchDescriptionSource(my_obstacle_files + '/launch/my_obstacle.launch.py'))
'''
# Start Rviz
rviz_file = my_environmets_files + "/rviz/my_rviz_env.rviz"
rviz_node = Node( package='rviz2',
executable='rviz2',
name='rviz2',
output='log',
arguments=['-d', rviz_file])
'''
# Start Gazebo
world_file_name = 'my_world.world'
world = os.path.join(get_package_share_directory('my_environment_pkg'), 'worlds', world_file_name)
gazebo_node = ExecuteProcess(cmd=['gazebo', '--verbose', world,'-s', 'libgazebo_ros_factory.so'], output='screen')
# Node
ld = LaunchDescription()
ld.add_action(doosan_robot)
ld.add_action(sphere_mark)
ld.add_action(obstacle_object)
ld.add_action(gazebo_node)
#ld.add_action (rviz_node)
return ld
3.4. 빌드 후 실행
rf
cb
ros2 launch my_environment_pkg my_environment.launch.py
4. 참고 문헌
- https://www.youtube.com/watch?v=14G81BxpGFU
- https://blog.naver.com/PostView.nhn?isHttpsRedirect=true&blogId=heennavi1004&logNo=221591758801&redirect=Dlog&widgetTypeCall=true&directAccess=false
- https://blog.naver.com/PostView.nhn?blogId=jerry1455&logNo=221710210977
- https://velog.io/@legendre13/URDF-형식#2-visual-namename